
چکيده:
یکی از روشهای کنترل فشار هیدرولیک سیستم ترمز ضد قفل (ABS)، استفاده از شیرهای الکتروهیدرولیکی 2/2 می باشد که به صورت روشن/خاموش عمل می کنند. از این رو نحوه کنترل این شیرها در هنگام عملکرد سیستم ترمز، تاثیر زیادی در عملکرد کلی سیستم ترمز ضد قفل دارد. در این مقاله ابتدا مشخصات الکتریکی یک نوع شیر الکتروهیدرولیکی سیستم ترمز ضد قفل ارائه شده و سپس بر مبنای رفتار عملکردی شیر الکتروهیدرولیکی، یک نمونه مدار راه انداز جهت کنترل شیرهای الکتروهیدرولیکی سیستم ترمز ضد قفل ارائه می شود. در مدار مذکور از استراتژی عیب یابی خاصی جهت آشکار سازی خطای اتصال کوتاه در مدار راه انداز استفاده شده است که در صورت بروز خطای اتصال کوتاه در شیرهای الکتروهیدرولیکی، خطای ایجاد شده را آشکار کرده، سپس در جهت به حداقل ساندن صدمات ناشی از خطای ایجاد شده در شیر الکتروهیدرولیکی، مدار راه انداز، واحد کنترل الکترونیکی و سیستم ترمز خودرو، تصمیم مناسبی اتخاذ می کند. با شبیه سازی این مدار در محیط نرم افزار ORCAD نتایج مورد انتظار که در ادامه مقاله خواهند آمد، محقق گردیده اند.
كليد واژه- آشکار سازی خطا، سیستم ترمز ضد قفل، شیر الکتروهیدرولیکی SSV & SDV، مدار راه انداز.
مقدمه
برای راه اندازی شیرهای الکتروهیدرولیکی، بطور معمول یک ترانزیستور قدرت می تواند میان میکروپرسسور و شیر الکتروهیدرولیکی قرار گیرد. به علت مزایای چشمگیر ترانزیستورهای اثر میدانی نسبت به ترانزیستورهای دیگر، اغلب از این نوع ترانزیستور در مدارهای مربوط به راه اندازها استفاده می شود. بنابراین در این مقاله سعی شده است که مداری مبتنی بر ترانزیستورهای اثر میدانی قدرت ارائه گردد. همان طور که در بالا اشاره شد، میکروپرسسور می تواند جهت راه اندازی شیر الکتروهیدرولیکی به صورت مستقیم به ترانزیستور اثر میدانی راه انداز متصل شود. اما با به کار گرفتن یک مدار جانبی که دارای یک مدار عیب یاب برای عیب یابی سلنوئیدها و همچنین یک سیستم امنیتی جهت بالا بردن امنیت مدار باشد، می تواند بازدهی واحد کنترل الکترونیکی سیستم ترمز ضد قفل را افزایش دهد. از آنجایی که سیستم ترمز ضد قفل یک سیستم زمان–واقعی است و در هر لحظه تعداد زیادی اعمال و تصمیم ها وجود دارند که میکروپرسسور باید در مورد آنها اقدامات صحیحی به انجام رساند، لذا به کار گرفتن یک مدار جانبی که بتواند عیب یابی سلنوئید ها را بر عهده گرفته و از طرفی ضریب امنیت بالاتری را برای آنها و کل سیستم فراهم کند، به نحو مطلوبی از حجم بار میکروپرسسور کاسته و برای میکرو پرسسور فرصت بررسی بیشتر و اتخاذ تصمیمات دقیق تر و سریعتر را فراهم می کند. مهمترین خطایی که ممکن است در یک مدار راه انداز شیر الکتروهیدرولیکی پدیدار شود، خطای اتصال کوتاه است که وقوع این خطا سیستم را به سرعت به حالت بحرانی سوق می دهد و در صورت عدم آشکار سازی آن و سپس به انجام رساندن مراحلی جهت حفاظت از سیستم در مقابل آن، صدمات جبران ناپذیری، مدار راه انداز و کل سیستم را تهدید می کند. روش های مختلفی برای آشکار سازی خطای اتصال کوتاه در مدارهای کلید زنی (Switching Circuits) توسط محققین و سازندگان قطعات الکترونیکی (به خصوص سازندگان مدارهای مجتمع قدرت هوشمند (Smart Power IC)) به کار گرفته شده اند. در [1و2] از تکنیک جاری کردن یک جریان کپی شده از جریان بار در یک مقاومت حسگر (Rsense) به واسطه اضافه کردن یک مدار آیینه جریان به مدار کلید زنی و استفاده از یک مقایسه گر جهت مقایسه افت ولتاژ در دو سر مقاومت حسگر با یک ولتاژ مرجع از پیش تنظیم شده استفاده شده است. مهمترین ایرادی که می توان به روش ارائه شده در [1و2] وارد دانست آن است که در مدارهای کلید زنی بارهای سلفی، در صورت بالا بودن فرکانس سیگنال اعمالی به گیت ترانزیستور (که به صورت سیگنال مدولاسیون عرض پا لس (PWM) است)، جریان متوسط عبوری از سلنوئید متناسب با چرخهکار (duty cycle) سیگنال کنترل کننده سوییچ (PWM ورودی) خواهد بود. [3] بنابراین استفاده از یک ولتاژ مرجع ثابت جهت آشکارسازی خطای اتصال کوتاه به روش نمونه برداری ولتاژی از جریان بار خا لی از اشکال نخواهد بود [4]. در تحقیق صورت گرفته توسط A. GRAF و همکارش [5]، دو روش جهت آشکار سازی وقوع حالت اتصال کوتاه در بار سلفی که بوسیله یک کلید بالا-دست (High Side Switch ) راه اندازی می شود، ارائه گردیده است که روش اول مبتنی بر نظارت (Monitoring) بر افت ولتاژ در دو سر مقاومت درین-سورس هنگام روشن بودن کلید (RDS(on)) و روش دوم بر اساس افت ولتاژ در دو سر بار (VLoad) است. ولی در [5] نیز همچنان ایراد استفاده از یک مرجع ثابت جهت مقایسه با VDS|on و VLoad وجود دارد. از طرفی حتی اگر با محاسبه حداکثر و حداقل جریان عبوری از بار سلفی به ازای تغییرات در فرکانس سیگنال ورودی PWM ، بتوان ولتاژ مرجع ثابتی را برای مقایسه حالات نرمال و حالت اتصال کوتاه به دست آورد، باز هم به دلیل نوسانات ولتاژی نمونه برداری شده، ممکن است این مرجع ثابت به اجبار طوری انتخاب شود که در برخی حالات، فاصله زمانی بین وقوع خطای اتصال کوتاه و اعلان خطا توسط مقایسه گر چنان بزرگ باشد که باعث ایجاد بار شدید (Severe Stress) بر ترانزیستور کلیدزنی و مدار راه انداز گردد. از سویی در محاسبه ولتاژ مرجع ثابت در [5] باید تغییرات مقدار RDS|on بر اثر تغییرات دمایی را نیز در نظر گرفت که این نکته محاسبه یک ولتاژ مرجع ثابت را پیچیده و مشکل می کند. همچنین توجه به این نکته لازم است که تا هنگامی میتوان از RDS|on به عنوان قطعه نمونه بردار ولتاژ استفاده کرد که ترانزیستور در ناحیه اهمی کار میکند اما روشن است که پس از وقوع اتصال کوتاه در سلنوئید، ولتاژ درین-سورس ماسفت چنان افزایش می یابد که از آن پس ماسفت را مجبور به عمل در ناحیه اشباع میکند. در [4] با اذعان به اینکه نباید ولتاژ مرجع مقایسه گر را یک مقدار ثابت در نظر گرفت، از تکنیکی جهت به کار گیری یک ولتاژ مرجع متغیر استفاده شده است. در این مقاله تفاضل ولتاژ تغذیه مدار و ولتاژ افت کرده در دو سر درین–سورس به عنوان مرجع در نظر گرفته شده است. اما با توجه به روابط ارائه شده میبایست در هنگام آشکارسازی خطا وضعیت روشن یا خاموش بودن ترانزیستور را نیز در نظر گرفت؛ زیرا ولتاژ مرجع محاسبه شده در دو حالت خاموش بودن ترانزیستور و همچنین هنگام رخ دادن خطای اتصال کوتاه (در هنگام روشن بودن ترانزیستور) مقدار یکسانی خواهد داشت. اما مشکل اساسی تمامی تکنیک های به کار گرفته شده در مراجع فوق این است که مدت زمان معینی باید طی شود تا جریان خطا به اندازه ای برسد که خطای اتصال کوتاه حس شود و سپس با گذشت زمان مشخصی، دستورات حفاظتی لازم جهت خاموش نمودن سوییچ صادر و اجرا شوند. در حین انجام گرفتن مراحل فوق یعنی از لحظه وقوع خطای اتصال کوتاه تا لحظه خاموش شدن سوییچ جریان غیر مجاز می تواند به سطوح خطرناکی برسد و بدین گونه موجب وارد آمدن بار شدید (Severe Stress) به مدار سوییچ شود. برای رفع این اشکال در [6] روشی مبتنی بر اندازه گیری شیب جریان خطا پیشنهاد شده است و هنگامی که شیب جریان خطا از یک مرجع از پیش تنظیم شده تجاوز میکند، خطای اتصال کوتاه حس می گردد و قبل از آنکه جریان خطا به سطوح خطرناکی برسد، دستور خاموش شدن سوییچ صادر میشود. روش ارائه شده در [6]، جهت مدارهای کلیدزنی مبتنی بر ترانزیستورهای قدرت دو قطبی بوده و به منظور سوییچ کردن یک بار اهمی خا لص به کار گرفته شده است. همچنین جهت نمونه برداری از جریان از یک ترانسفورماتور جریان استفاده شده و یک مدار بسیار حجیم و مفصل نیز به منظور به دست آوردن شیب جریان طراحی شده است [6]. روش پیشنهاد شده در مقاله حاضر برای نمایان کردن خطای اتصال کوتاه، بر اساس اندازه گیری شیب جریان خطا می باشد. اما این تکنیک را در مدار راه انداز یک بار سلفی (شیرهای الکتروهیدرولیکی) که در آن از ترانزیستور اثر میدانی استفاده شده به طریقی کاملاً متفاوت نسبت به [6] به کار گرفته است. در این مقاله جهت آشکار سازی شیب جریان از یک مدار بسیار ساده مشتق گیر استفاده شده است، بدون آنکه نیاز به ترانسفورماتور جریان برای نمونه برداری از جریان و نیاز به مدار حجیمی برای بدست آوردن شیب جریان باشد. از طرفی، اگر در نهایت هدف مجتمع سازی مدار این راهانداز به صورت یک مدار مجتمع قدرت هوشمند (Smart Power Integrated Circuit) باشد، مدار پیشنهادی مقاله حاضر کاملاً نسبت به مدار ارائه شده در مرجع [6] برتری داشته و از طرفی به دلیل استفاده از ترانزیستور اثر میدانی در مدار راهانداز پیشنهادی و مزایای چشمگیر این ترانزیستورها نسبت به ترانزیستورهای دو قطبی و به خصوص مزیت ترانزیستورهای اثر میدانی در پروسه های مجتمع سازی، طرح پیشنهادی این مقاله باز هم نسبت به طرح ارائه شده در [6] رجحان دارد. در این مقاله ابتدا با توجه به مشخصات الکتریکی یک شیر الکتروهیدرولیکی واقعی به کار رفته در یک سیستم ترمز ضد قفل، مداری جهت راه اندازی شیرهای الکتروهیدرولیکی ارائه می شود. سپس یک مدار جانبی جهت عیب یابی شیرهای الکتروهیدرولیکی به مدار راه انداز اضافه شده و در پایان برای بالابردن ضریب امنیتی کل سیستم، از تکنیکی جهت خارج کردن مدار راهانداز معیوب، از سیستم و همچنین اعلان خطر در مورد از کار افتادن راه انداز استفاده می شود.
مدل الکتریکی یک شیر الکتروهیدرولیکی واقعی
به طور کلی برای مدل کردن شیر الکتروهیدرولیکی، آنالیز ساختاری پیشنهاد شده این است که یک شیر الکتروهیدرولیکی را می توان به دو زیر سیستم مکانیکی و زیر سیستم الکترومغناطیسی تقسیم کرد. بنابراین مدل واقعی و کامل شیر الکتروهیدرولیکی یک مدل کاملا غیر خطی خواهد بود که تجزیه و تحلیل آن کاری دشوار است[7]. در این مقاله از مدل الکتریکی شیر الکتروهیدرولیکی سیستم ترمز ضد قفل استفاده شده است. هر سلف را می توان با استفاده از یک سیم پیچ با ضریب خودالقایی (L) مشخص و یک مقاومت اهمی (R) سری شده با آن با مقدار معین مدل کرد. مدل در نظر گرفته شده در این مقاله در شکل 1 آمده است.
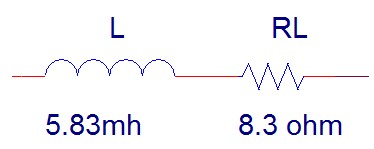
شکل 1: مدل الکتریکی در نظر گرفته شده برای شیر الکتروهیدرولیکی
مدار راه انداز شیرهای الکتروهیدرولیکی
سوییچ های قدرت به کار گرفته شده برای اعمال کلید زنی در خودروها باید قابلیت سوییچینگ بارهای القایی (محرک های الکترومکانیکی، شیرهای سلنوئیدی، رله ها و … ) را داشته باشند در حالی که از حداقل اجزا اضافی استفاده میکنند. [4]. مدارهای سوییچینگ قدرت که در خودرو به کار می روند معمولاً به عنوان یک سوییچ بالا– دست(High Side Switch) مورد استفاده قرار می گیرند که دارای ایمنی بالاتری نسبت به سوییچ های پایین- دست می باشند[8]. شکل 2 مدار اولیه راه انداز شیر الکتروهیدرولیکی را با استفاده از یک ترانزیستور اثر میدانی قدرت به عنوان کلید بالا– دست نشان می دهد.
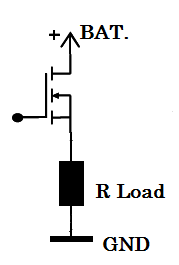
شکل 2: مدار کلید بالا- دست جهت راه اندازی شیر الکتروهیدرولیکی
از آنجا که شیرهای سلنوئیدی برای عملکرد، علاوه بر نیاز به جریان بالا، در اکثر مواقع نیاز به ولتاژی در حدود ولتاژ باتری دارند از اینرو برای عملکرد مدار شکل 2، باید پتانسیل سورس نسبت به زمین مدار در حدود 12 ولت باشد که برآوردن این خواسته با توجه به ولتاژ درین – سورس مورد نیاز برای روشن ماندن ترانزیستور،کار چندان راحتی نیست. بنابراین باید راه حلی را جستجو کرد که اولاً سلنوئید به درین متصل باشد و ثانیاً سلنوئید مستقیماً به پلاریته مثبت باتری وصل نباشد. در مرجع [9] برای حل مشکل ذکر شده، از رله ای مانند شکل 3 استفاده شده است.
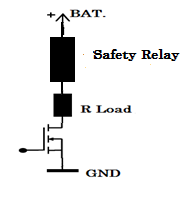
شکل 3: مدار کلید پایین- دست به همراه رله امنیتی
البته حضور رله امنیتی همانطور که از نامگذاری آن پیداست، یک علت دیگر نیز دارد و آن غیر فعال کردن سیستم ترمز ضد قفل در هنگام بروز خطاست[10]. حتی اگر ترانزیستور قدرت بتواند با فرکانس بالا روشن و خاموش شود، جریان عبوری از سیم پیچ نمی تواند تحمل تغییرات ناگهانی را داشته باشد. بنابراین یک مدار اسنابر (Snubber Circuit) برای حفاظت از ترانزیستور در مقابل نیرو محرکه معکوس تولید شده در مدت زمانی که ترانزیستور خاموش است ضروری به نظر می رسد. [3]. مدار اسنابر در نظر گرفته شده برای این راه انداز یک دیود هرزگرد است که در شکل 4 نمایش داده شده است.
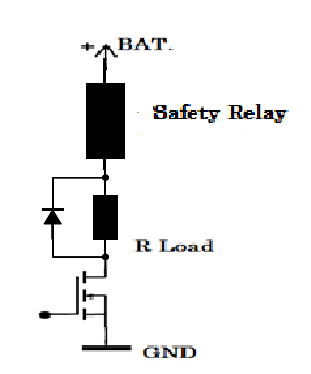
شکل 4: اضافه نمودن مدار اسنابر به مدار راه انداز
مدار راه انداز و عیب یاب ارائه شده
شیرهای الکتروهیدرولیکی، یکی از مهمترین قطعات سیستم ترمز ضد قفل میباشند. از طرفی سیستم ترمز ضد قفل، نقش بسیار مهمی در کنترل و پایداری خودرو بر عهده دارد. لذا عملکرد صحیح این شیرها بسیار حائز اهمیت بوده و باید مدار راه انداز را به نحوی طراحی کرد که در صورت بروز هر گونه عیبی، راننده را از بروز عیب مطلع کرده و سیستم نیز به مد امنیتی و مطمئن تغییر وضعیت دهد. از اینرو عیب یابی شیرهای الکتروهیدرولیکی بسیار حائز اهمیت است. با توجه به [11]، دو خطای مهم که در مدار شیرهای سلنوئیدی ایجاد می شود، عبارتند از خطای اتصال کوتاه و خطای مدار- باز. یکی از مهمترین خطاهایی که ممکن است در یک مدار راه انداز پدیدار شود، خطای اتصال کوتاه می باشد. این خطا می تواند، سیستم را به سرعت به حالت بحرانی سوق داده و در صورت عدم آشکار سازی آن و سپس به انجام رساندن مراحلی جهت حفاظت از سیستم در مقابل آن، صدمات جبران ناپذیری، مدار راه انداز و کل سیستم را تهدید می کند. مدار در نظر گرفته شده در این مقاله جهت برآوردن نیازهای ذکر شده فوق را می توان به صورت بلوک دیاگرام شکل 5 نشان داد.
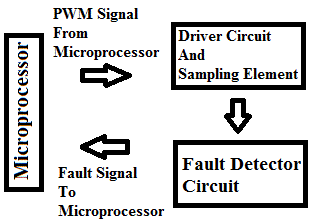
شکل 5: بلوک دیاگرام راه اندازی و عیب یابی شیرهای سلنوئیدی
همانطور که در شکل 5 داده شده است بلوک راه انداز مطابق دستورات ارسالی از میکروپرسسور که به صورت سیگنالهای PWM خواهد بود، موجبات سوییچ کردن شیر الکتروهیدرولیکی را فراهم خواهد نمود. از طرفی این بلوک دارای قطعهای جهت نمونه برداری از جریان عبوری از شیر سلنوئیدی خواهد بود که در این مقاله یک مقاومت اهمی (Rsam) کوچک در نظر گرفته شده است که اندازه این مقاومت حداقل ده برابر کوچکتر از مقاومت اهمی شیر الکتروهیدرولیکی باشد تا بتوان از آن در مقابل مقاومت شیر الکتروهیدرولیکی صرف نظر کرد. با توجه نکات فوق و مراحل طی شده در بخش 3 مقاله جهت طراحی یک مدار راه انداز میتوان مدار شکل 6 را به عنوان جایگزینی مناسب برای بلوک مدار راه انداز و عنصر نمونه بردار ارائه داد.

شکل 6: مدار ارائه شده جهت جایگزینی بلوک مدار راه انداز و عنصر نمونه بردار
همانطور که در مقدمه مقاله ذکر شد، تکنیک به کار گرفته شده در این مقاله جهت آشکارسازی خطای اتصال کوتاه، استفاده از شیب جریان عبوری از شیر سلنوئیدی است. برای تخمین زدن شیب این جریان از یک مدار مشتق گیر مطابق شکل 7 استفاده شده است.
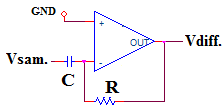
شکل 7: مدار ارائه شده جهت تخمین زدن شیب جریان عبوری از شیر الکتروهیدرولیکی
افت ولتاژ بر روی مقاومت Rsam. از رابطه 1 حاصل می شود:
![]()
که در این رابطه Rsam. مقاومت نمونه بردار، Is جریان سورس و Vsam. مقدار افت ولتاژ بر روی مقاومت نمونه بردار است. از سویی با توجه به مدار شکل 7، Vdiff. از رابطه 2 به دست می آید:

با توجه به روابط 1و2 می توان نوشت:

میتوان مقدار ثابت K را به صورت K= تعریف کرد، پس مطابق رابطه 4 شیب جریان عبوری از شیر سلنوئیدی برابر با ضریب ثابتی از ولتاژ خروجی مدار مشتق گیر است.

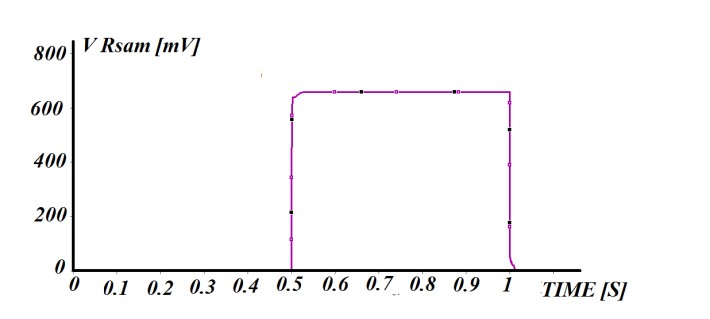
این نتیجه را شبیه سازی های شکل 8 تائید می کند.
الف)
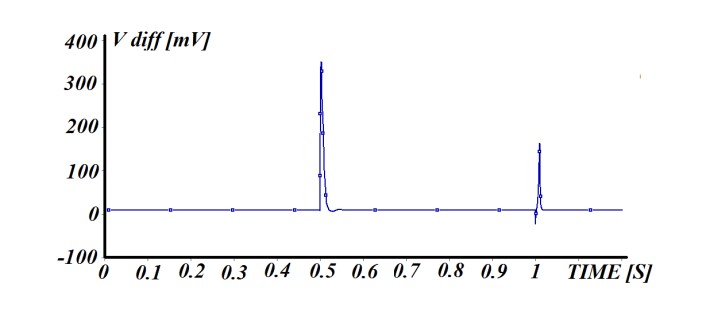
ب)
شکل 8: الف) منحنی افت ولتاژ بر روی مقاومت Rsam. به عنوان ودوری مدار مشتقگیر، ب) منحنی ولتاژ خروجی مدار مشتقگیر (Vdiff.) که ضریبی از منحنی شیب جریان سلنوئید است.
برای اطمینان از اجرای صحیح عملیات مشتق گیری توسط مدار مشتق گیر، باید مقادیر R و C طوری انتخاب گردند که شرط کوچک بودن ثابت زمانی مدار مشتق گیر ( τ = RC ) در مقابل حداقل دوره تناوب سیگنال ورودی مدار مشتق گیر برقرار باشد ( T<< τ ). از آنجا که حداکثر فرکانس عملکرد شیرهای الکتروهیدرولیکی 10 هرتز است [18] ، در نتیجه حداقل دوره تناوب برابر با 100 میلی ثانیه خواهد بود. بنابراین در شبیه سازی صورت گرفته مقدار 5 اهم برای مقاومت R و مقدار 1000 میکروفاراد برای ظرفیت خازن C در نظر گرفته شده است.
علاوه بر مدار مشبقگیر ذکر شده، بخش دیگری که باید در بلوک آشکارساز خطای اتصال کوتاه استفاده شود یک مدار مقایسه گر است که وظیفه تصمیم گیری در مورد وقوع یا عدم وقوع خطای اتصال کوتاه را در مدار راه انداز بر عهده دارد. با یافتن بزرگترین تخمین از شیب جریان عبوری از شیر الکتروهیدرولیکی در حالت عملکرد نرمال و در سراسر محدوده فرکانسی مدار راه انداز و استفاده از آن برای پیدا کردن یک ولتاژ مرجع (Vref.) و مقایسه خروجی مدار مشتق گیر در همه زمانها با آن مقدار مرجع میتوان وقوع حالت اتصال کوتاه را در شیر الکتروهیدرولیکی آشکار نمود.
روشن است که ولتاژ مرجع انتخاب شده متناسب با شیب جریان عبوری از شیر و نه خود جریان عبوری از سلنوئید میباشد و به همین دلیل نسبت به روش های بررسی شده در [1]، [2]، [4] و [5] فشار و استرس کمتری به مدار راه انداز و ترانزیستور سوییچینگ وارد خواهد نمود، زیرا لازم نیست مدت زمان معینی طی شود تا جریان خطا به اندازه ای برسد که خطای اتصال کوتاه حس شود بلکه در هر لحظه با استفاده از تخمینی از شیب جریان نمونه برداری شده در مورد آن تصمیم گیری میشود.
مدار مقایسه گر مورد نیاز در شکل 9 نشان داده شده است.
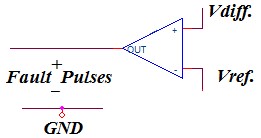
شکل 9: مدار ارائه شده جهت مقایسه و تصمیم گیری در مورد وقوع یا عدم وقوع خطای اتصال کوتاه
مدار کلی راه انداز و آشکار ساز خطای اتصال کوتاه در شکل 10 آمده است.
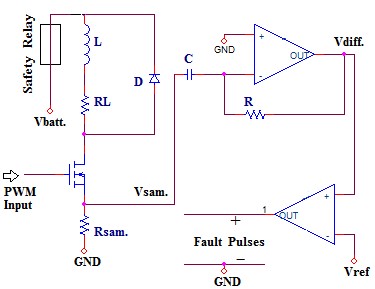
شکل 10: کل مدار ارائه شده جهت راه اندازی و آشکارسازی خطای اتصال کوتاه
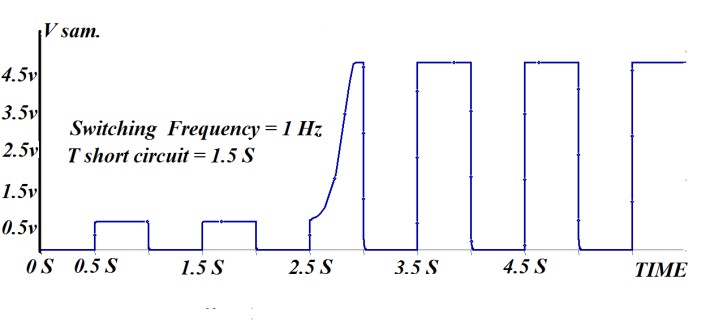
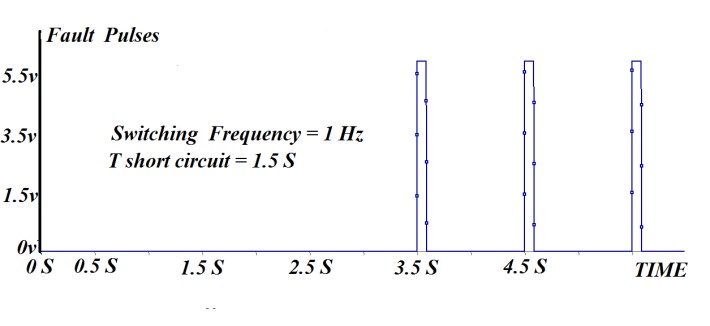
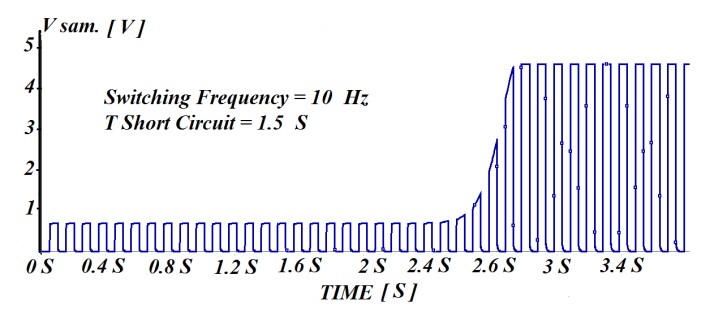
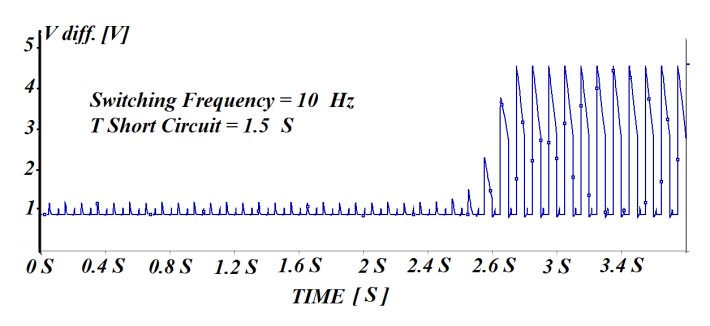
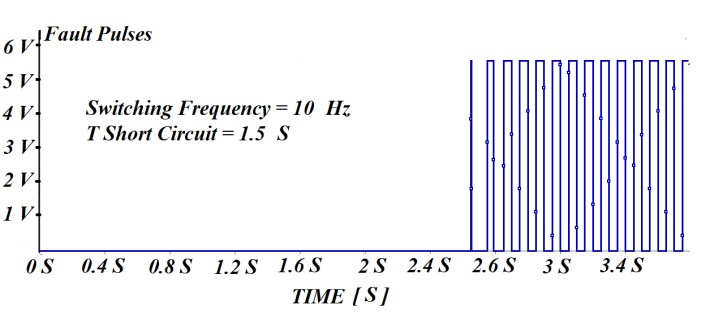
همانطور که عنوان شد، حداکثر فرکانس عملکرد شیرهای الکتروهیدرولیکی ABS به استناد [18] به طور معمول 10 هرتز می باشد. بنابراین آشکارسازی خطای اتصال کوتاه را یکبار در فرکانس 1 هرتز و بار دیگر در فرکانس 10 هرتز شبیه سازی نموده و نتایج در شکل 11 نمایش داده میشوند.
الف)
ب)
شکل 11: نتایج شبیه سازی آشکارسازی خطای اتصال کوتاه، الف) فرکانس 1 هرتز ب) فرکانس 10 هرتز
خارج کردن مدار راه انداز معیوب از مدار
پالس های خطای آشکار شده به یکی از پورت های ورودی میکروپرسسور ارسال میشود و میکروپرسسور بلافاصله پس از دریافت این پالس ها اقدامات زیر را اجرا می کند:
الف – با قطع کردن اتصال منفی مدار راه انداز رله امنیتی باعث جدا شدن باتری از مدار راه انداز تمامی شیرهای الکتروهیدرولیکی می گردد.
ب – از ارسال فرمان به گیت تمامی ترانزیستورهای راه انداز شیرهای الکتروهیدرولیکی صرف نظر می کند.
ج – سیستم ترمز ضد قفل از مدار خارج و اعلان کننده وجود عیب در سیستم ترمز ضد قفل، لامپی را برای راننده روشن می کند.
روشن است که در صورت از مدار خارج شدن سیستم ترمز ضد قفل، خودرو با استفاده از سیستم ترمز معمولی به کار خود ادامه خواهد داد تا وقتی که نسبت به رفع نقص در سیستم ترمز ضد قفل اقدام شود. [14].
نتيجهگيری
در این مقاله سعی بر آن بود که مداری مستقل، وظیفه عیب یابی مدار راه انداز شیرهای الکتروهیدرولیکی سیستم ترمز ضد قفل خودرو را بر عهده گرفته و در هنگام وقوع خطای اتصال کوتاه، با ارسال سیگنالی به میکروپرسسور آن را از وقوع نقص در مدار راه انداز آگاه کرده تا میکروپرسسور از ارسال فرمان راه اندازی به گیت ترانزیستور قدرت خودداری کرده و دستور خروج کل سیستم ترمز ضد قفل از مدار را صادر کند و همچنین با روشن نمودن مدار اعلان کننده خطا در صفحه نشان دهنده های خودرو، راننده را از وقوع نقص در سیستم ترمز ضد قفل آگاه گرداند. ویژگی مهم این رویکرد عیب یابی مدار راه انداز شیرهای الکتروهیدرولیکی به صورت مستقل از میکروپرسسور است به نحوی که تا حد امکان از حجم بار محاسباتی میکروپرسسور کاسته شده و میکروپرسسور را در تحلیل اطلاعات و اتخاذ تصمیم های جدید یاری نماید. این رویکرد به عنوان یک روش مورد قبول دنبال می شود، چنانکه محققین و شرکت های سازنده قطعات الکترونیک را به سمت ساخت مدارهای مجتمع قدرت هوشمند (IPIC) کشانده است. این نکته به روشنی در [8 و 13 و 16 و 17] به چشم می خورد.
مراجع
[1] A. Danchiv, “Protection Functions In Integrated Low Side Switches,” Int. Conf. on Semiconductor (CAS), VOL. 2, pp. 513-516, 2007.
[2] A. Luca, A. Tranca and A. Danchiv, “High Precision Over Current Detection For A High Side Switch,” Int. Conf. on Semiconductor (CAS), VOL. 3, pp. 385-388, 2008.
[3] A. Emadi, Handbook of Automotive Power Electronics and Motor Drives. Taylor & Francis Group, pp. 644-648, 2005.
[4] M. Glavanovics, H. Kock, “A new cycle test system emulating inductive switching waveforms,” Power Electronics and applications European Conf., pp. 1-9, 2007.
[5] A. Graf, H. Estl, Fuse Function with PROFET Highside Power Switches, Siemens Power Semiconductors, 1999.
[6] A. K. Khargekar and P. Pavana Kumar, “A Novel Scheme for Protection of Power Semiconductor Devices Against Short Circuit Faults,” IEEE Trans. On Industrial Electronics, Vol. 41, No. 3, pp. 344-351, 1994.
[7] M. Branciforte, A. Meli, “ANN and Non-Integer Order Modeling of ABS Solenoid Valves,” IEEE TRANS. ON CONTROL SYSTEMS TECH., VOL. 19, NO. 3, pp. 628-635, 2011.
[8] K. Sakamoto,Y. Nunogawa, “ An Intelligent power IC with Reverse Battery Protection For High-Side Solenoid Driver,” Proc. Int. Symp. on Power Semiconductor Devices & ICs, pp. 406-410, 1995.
[9] H. Kumamato, H. Ishii, “Electronic Control Unit of the Somitomo Electronic Antilock System,” SAE Technical Paper, SAE Paper Number: 89087, 1989.
[10] P. Sowa and A. Stegmaier, “Automotive Brake Systems,” Robert Bosch GmbH., 1995.
[11] Y. Guizhen, Z. Chengyang, D. Nenggen, “ Design of Fault Diagnostic System for An ABS Based on Dual-CPU Structure,” IEEE Int. Conf. on Vehicular Electronics and Safety, pp. 174-177, 2006.
[12] Robert Bosch GmbH, Plochingen, “Anti-lock brakes system specification”, 2005.
[13] Texas Instruments “ PWM Solenoid/Valve Driver Data Sheet”, 2009, www.ti.com.
[14] T. Aburaya, H. Kondo, “ Development Of An Electronic Control System For Active Suspension,” Proc. Conf. On Decision And Control, pp. 2220-2225, 1990.
[15] T. Wescott, “Controlling Motors In The Presence Of Friction And Backlash,” Wescott Seminars , 2010.
[16] A. M. Pawlak, T. W. Nehl, “ Transient Finite Element Modeling of Solenoid Actuators: The Coupled Power Electronics, Mechanical and Magnetic Field Problem,” IEEE Trans. On Magnetics, Vol. 24, No. 1,pp. 270-273, 1988.
[17] K. Yoshida, S. Kiuchi, “Smart PWM Driver in SO-8 for Automotive Solenoid Controls,” Proc. Int. Symp. on Power Semiconductor Devices & ICs, pp: 271-274, 2001.
[18] H. Heisler, “Vehicle and Engine Technology”, Second Edition, Arnold, 1999 .
1.دانشجوی کارشناسی ارشد، دانشگاه تربیت دبیر شهید رجایی ، nmnm598@gmail.com
2.استادیار دانشکده مهندسی برق و کامپیوتر، دانشگاه تربیت دبیر شهید رجایی ، pamirii@srttu.edu
3.مربی مرکز کارگاه های آموزشی، دانشگاه صنعتی شریف ، nasiri@sharif.edu
4.استادیار دانشکده مهندسی برق و کامپیوتر، دانشگاه صنعتی خواجه نصیر الدین طوسی ، amsodagar@eetd.kntu.ac.ir
گروه فنی مهندسی اِیمِگ




")
