
نحوه استقرار تایر بر روی سطح جاده و زوایای محور چرخ نسبت به محورهای عمودی، طولی و عرضی را خصوصیات سینماتیکی مکانیزمهای تعلیق و فرمان گویند که تاثیر بسیار زیادی در پایداری و نحوه حرکت خودرو دارد. تنظیم این زوایا با توجه به مستندات فنی خودروساز را تنظیم فرمان یا تنظیم زوایای چرخهای خودرو گویند. برخی از مهمترین پارامترها، به شرح ذیل می باشند:
- تغییر فاصله عرضی بین چرخها (Track alteration)
- تغییر زاویه کمبر (Camber alteration)
- تغییر زاویه کستر (Caster alteration)
- تغییر زاویه تو (Toe alteration)
که در ذیل به بررسی آنها پرداخته می شود:
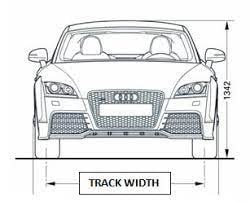 فاصله عرضی بین چرخها
فاصله عرضی بین چرخها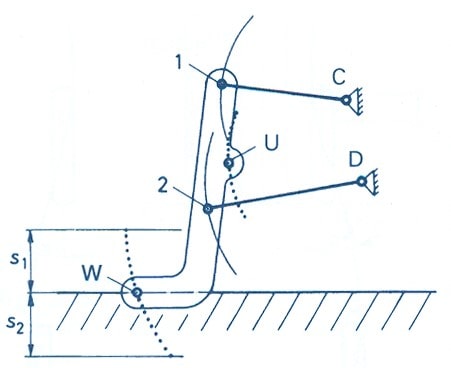 1- محل اتصال طبق بالا به سگدست 2- محل اتصال طبق پایین به سگدست
1- محل اتصال طبق بالا به سگدست 2- محل اتصال طبق پایین به سگدست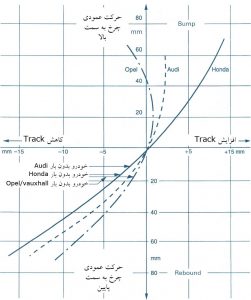 تغییر Track یک چرخ در سه خودرو مختلف
تغییر Track یک چرخ در سه خودرو مختلف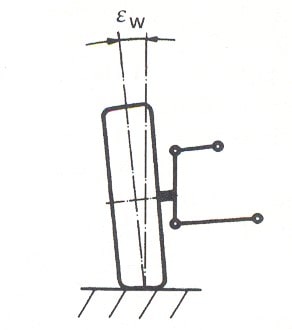 زاویه کمبر مثبت
زاویه کمبر مثبت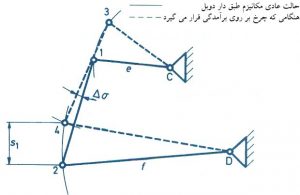 تغییر زاویه کمبر در مکانیزم طبقدار دوبل
تغییر زاویه کمبر در مکانیزم طبقدار دوبل تغییر زاویه کمبر سه خودرو مختلف
تغییر زاویه کمبر سه خودرو مختلف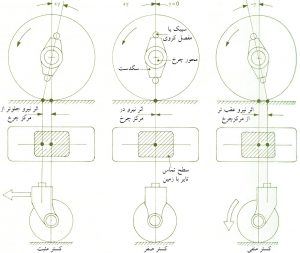 زاویه کستر
زاویه کستر تغییر زاویه کستر برای سه خودرو مختلف با مکانیزم مک فرسون
تغییر زاویه کستر برای سه خودرو مختلف با مکانیزم مک فرسون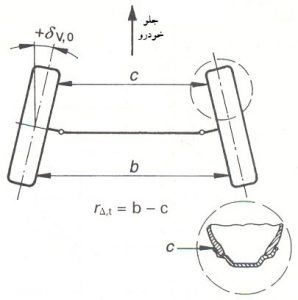 زاویه Toe
زاویه Toe تغییر زاویه Toe چرخ های جلوی خودرو
تغییر زاویه Toe چرخ های جلوی خودرو دستگاه میزان فرمان
دستگاه میزان فرمان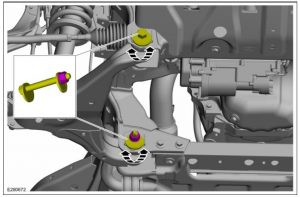 نحوه تنظیم زاویه کمبر
نحوه تنظیم زاویه کمبر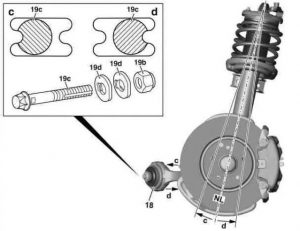 تنظیم زاویه کستر
تنظیم زاویه کستر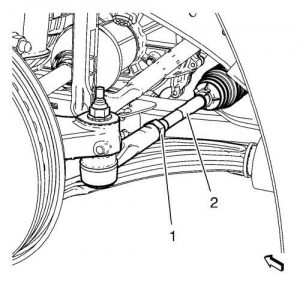 تنظیم زاویه Toe چرخ های جلو
تنظیم زاویه Toe چرخ های جلو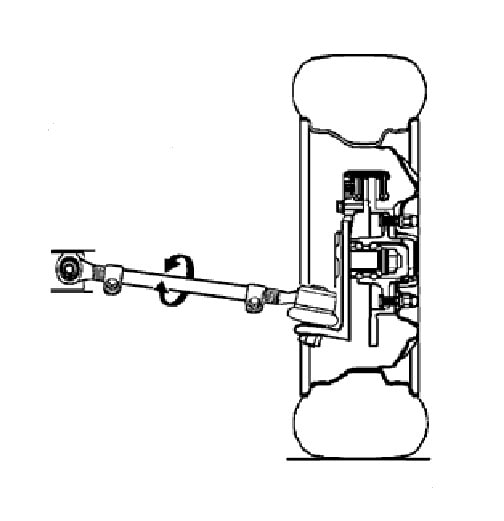 تنظیم زاویه Toe چرخ های عقب
تنظیم زاویه Toe چرخ های عقب



")
