
کروز کنترل تطبیق شونده
Adaptive Cruise Control
Adaptive Cruise Control
در مقاله سیستم کروز کنترل در مورد انواع سیستمهای کروز کنترل اطلاعاتی ارائه شد،استفاده از سیستم کروز کنترل تطبیقی در خودروهای امروزی امری رایج بوده که میزان ایمنی بالاتری را در اختیار قرار میدهد در ادامه به بررسی این سیستم خواهیم پرداخت.
system Active crouse control system – Adaptive Crouse control
امروزه توجه به سطح ایمنی خودرو یکی از فاکتورهای اساسی در تولید و فروش خودروها است. باتوجهبه پیشرفت تکنولوژی در صنعت خودرو و بهرهگیری از سیستمهای هوشمند، الکترونیکی با قابلیت برنامهریزی دانشمندان سعی در جبران خطای خودرو و راننده در هنگام بروز خطر هستند. از سوی دیگر افزایش راحتی نیز از فاکتورهای اساسی است.
یکی از سیستمهایی که بهمنظور راحتی راننده در جادههای خارج شهر و اتوبانهای شهری طراحی گردید، کروز کنترل است. این سیستم وظیفه تثبیت سرعت خودرو بر اساس نیاز راننده را بر عهده دارد. این سیستم میزان راحتی رانندگی را افزایش و خستگی و استرس راننده را کاهش میدهد. کروز کنترل تطبیق شونده جز سیستمهای پشتیبانی رانندگی محسوب میشود. این سیستم برای تطبیق سرعت خودرو با محیط ترافیک و خودروی جلویی مجهز به یک سیستم راداری متصل به جلوی خودرو برای تشخیص سرعت خودروی جلویی است.
باتوجهبه اینکه سرعت خودرو توسط راننده از پیش تعیین میشود، این سیستم فاصله بین دو خودرو را کنترل و مانع از برخورد آنها با یکدیگر شود و همچنین قادر است خودروی جلوی را با سرعت کمتر دنبال کند.
شرکت خودروسازی میتسوبیشی در سال ۱۹۹۲ میلادی برای نخستینبار در محصولات خود یک سیستم کروز کنترل ویژه را ارائه کرد. این سیستم قادر بود خودروها یا سایر موانع که به خودرو نزدیک میشوند را شناسایی کرده و به راننده هشدار دهد. راننده نیز پس از دریافت هشدار باید با فشردن پدال گاز مانع تصادف میشد.
در واقع تفاوت اصلی کروز کنترلهای اولیه با نسخههای پیشرفته جدید به نوع ترمزگیری آنها مربوط میشود. راننده در مدلهای اولیه باید فرایند ترمزگیری را انجام میداد، اما نسخههای پیشرفتهتر این سیستم میتواند به شکل خودکار فرایند ترمزگیری را انجام دهد.
شرکت میتسوبیشی در سال 1995 میلادی نیز سیستم جدیدی از کروز کنترل مبتنی بر لیزر را روی خودرو دیامانته (Diamante) عرضه کرد. این سیستم پس از این که فاصله بامانع را تشخیص میداد، قادر بود سرعت را با کمکردن دنده و کنترل دور موتور کاهش دهد، اما همچنان فرایند ترمزگیری بر عهده راننده بود.
خودروسازان بزرگی نظیر آئودی، تویوتا، فولکسواگن، بی ام و، مرسدس و فورد در ابتدای قرن ۲۱ سیستمهای کروز کنترل پیشرفتهای را به شکل اختصاصی طراحی کردند که سیستمهای تشخیصدهنده هرکدام از آنها با یکدیگر تفاوت داشت. این سیستم پیشرفته اینگونه عمل میکند که به کمک سیستم تشخیصدهنده قادر است سرعت خودرو را بر اساس یک فاصله مشخص از خودرو جلویی تنظیم کند.
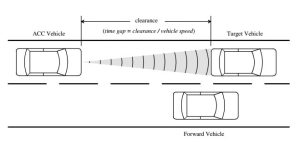 ACC Vehicle: خودروی مجهز به کروز کنترل تطبیقی
ACC Vehicle: خودروی مجهز به کروز کنترل تطبیقی
Target Vehicle: خودروی هدف
clearance: فاصله سپر جلوی خودروی دارای کروز کنترل تطبیقی تا سپر عقب خودروی هدف (خودروی جلویی)
Forward Vehicle: خودروهای هم مسیر و جلوتر از خودروی دارای کروز کنترل تطبیقی
شکل 1- شماتیک عملکردی سیستم کروز کنترل تطبیقی
حالتهای مختلف عملکرد سیستم کروز کنترل تطبیقی
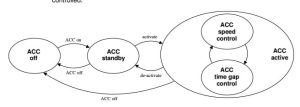 شکل 2- شماتیک حالتهای سیستم
شکل 2- شماتیک حالتهای سیستم
در این حالت سیستم غیرفعال است.
ACC standby
در این حالت سیستم آماده فعالشدن توسط راننده است.
در این حالت سیستم کروز کنترل تطبیقی فعال است و دو فاکتور سرعت و فاصله را تا خودرو جلویی کنترل مینماید.
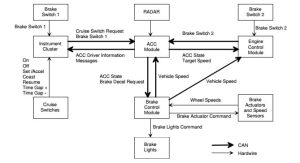
همان گونه که در شکل 4 ملاحظه میکنید سیستم کروز کنترل تطبیقی شامل چندین زیرسیستم است که با استفاده از پروتکل ارتباطی CAN با یکدیگر مرتبط است.
وظیفه این ماژول دریافت اطلاعات از سنسورهای سیستم و همچنین پردازش این اطلاعات بهمنظور شناسایی وجود و یا عدم وجود خودرو و یا هرگونه مانع در مسیر است بعلاوه این ماژول دستورات لازم را به ماژولهای موتور و ترمز جهت کنترل دور موتور و فعالسازی سیستم ترمز صادر مینماید.
وظیفه اصلی ماژول کنترل موتور دریافت اطلاعات از ماژول ACC و کلیدهای کنترلی سیستم کروز کنترل تطبیقی که توسط راننده کنترل میشوند و همچنین سنسورهای مدیریت موتور بهمنظور کنترل سرعت خودرو بر اساس این اطلاعات است. ماژول کنترل موتور با کنترل دریچه گاز موتور، سرعت خودرو را کنترل میکند.
وظیفه اصلی ماژول کنترل سیستم ترمز تعیین سرعت خودرو از طریق هر چرخ و کاهش سرعت خودرو با اعمال ترمز در صورت درخواست ماژول ACC است. سیستم ترمز هیدرولیک در این خودروها مجهز به سیستم ترمز ضد قفل ABS و یا کنترل پایداری ESP و سایر سیستمهای پیشرفته ترمز هستند.
عملکرد اصلی این ماژول پردازش سوئیچهای کروز و ارسال اطلاعات آنها به ماژولهای ACC و کنترل موتور است. همچنین این ماژول پیامهای متنی و هشدارهایی را برای راننده نمایش میدهد تا راننده اطلاعاتی در مورد وضعیت سیستم ACC داشته باشد.
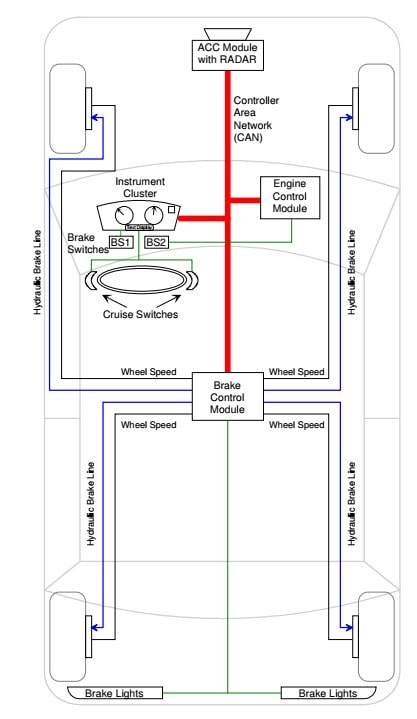 شکل 3- شماتیک سیستم کروز کنترل تطبیقی
شکل 3- شماتیک سیستم کروز کنترل تطبیقی
شبکه CAN مشهورترین پروتکل ارتباطی بین واحدهای کنترلی در خودروهای امروزی است. این شبکه شامل گروهی از ماژولها و اتصالات است که این اتصالات برای تبادل اطلاعات بین ماژولها ایجاد شده است. به این اتصالات، اصطلاحاً Bus گفته میشود. Bus مانند بزرگراهی است که دادهها داخل آن بین ماژولها در حال عبور و مرور هستند. این Busها در واقع پیوند مشترکی بین ماژولها برقرار میکنند، بطوریکه برای به اشتراک گذاشتن دادهها نیازی به سیمکشی مجدد نباشد. برای اطلاعات بیشتر به مقاله معرفی شبکه CANN مراجعه کنید.
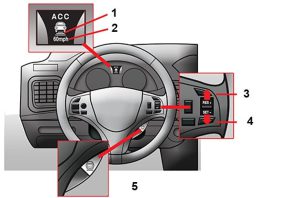 1- فاصله تنظیم شده با خودرو جلویی 2- سرعت تنظیم شده 3- کلید افزایش سرعت 4- کلید کاهش سرعت 5- کلید تنظیم فاصله
1- فاصله تنظیم شده با خودرو جلویی 2- سرعت تنظیم شده 3- کلید افزایش سرعت 4- کلید کاهش سرعت 5- کلید تنظیم فاصله
شکل 4- منوها و کلیدهای تنظیم در کروز کنترل تطبیقی
بسته به نوع خودرو و سیستم نصب شده بر روی برای فعالسازی کروز کنترل باید سرعت و میزان فاصله با خودروی جلویی تنظیم گردد. اکثر تنظیمات با استفاده از کلیدهای روی غربیلک فرمان انجام میگردد. نکته مهم در این زمان عملکرد سیستم این است که راننده در هر زمان میتواند با فشردن پدال ترمز و گاز سیستم را خاموش و کنترل خودرو را به دست گیرد.
برای انتخاب سرعت مناسب به دو روش میتوان عمل کرد.
نکته: اکثر کروز کنترلها در سرعتهای بالای 40 km/h فعال میشوند.
سیستم کروز کنترل تطبیق شونده این امکان را برای راننده فراهم میکند تا نسبت به تنظیم فاصله خودرو با خودروی جلویی اقدام نماید. فاصله را میتوان در یکی از سه حالت مسافت کوتاه، متوسط و بلند تنظیم نمود که در هر زمان باتوجهبه ترافیک و شرایط رانندگی میتوان آن را تغییر داد. البته برای تمامی رانندگان مسافت زیاد توصیه میگردد.
در این سیستم دو سوئیچ ترمز که با سوئیچ ترمز 1 (BS1) و سوئیچ ترمز 2 (BS2) در شکل 4 نشاندادهشده است، وجود دارد وقتی یکی از سوئیچهای ترمز فعال میشود، عملکرد کروز کنترل غیرفعال میشود و سیستم وارد حالت آمادهبهکار ACC میشود.
هنگامی که ماژول کنترل ترمز در پاسخ به درخواست ماژول ACC، سیستم ترمز را فعال میکند، چراغهای ترمز را روشن میشود تا به خودروهای پشت خودروی ACC هشدار دهد که خودرو در حال کاهش سرعت است.
کاربری سیستم کروز کنترل تطبیق شونده همانطور که در بالا ذکر شد شبیه سیستم کروز کنترل معمولی است که مجموعه کلیدهای کنترلی بر روی غربیلک فرمان توسط راننده کنترل میگردد. تفاوت این سیستم با سیستم معمولی در تعیین فاصله است که در این سیستم باید توسط راننده علاوه بر انتخاب سرعت تنظیم شود. بعلاوه علایم هشداردهندهای از وضعیت کروز کنترل تطبیق شونده در صفحه داشبورد خودرو جهت اطلاع راننده از وضعیت سیستم قرار داده شده است.
 شکل 5- شماتیک الگوریتم عملکردی سیستم کروز کنترل تطبیقی
شکل 5- شماتیک الگوریتم عملکردی سیستم کروز کنترل تطبیقی
شکل 5 چگونگی انتقال اطلاعات و سیگنال بین سیستمهای مختلف برای عملکرد سیستم کروز کنترل تطبیقی را نشان میدهد.
زمانی که موتور خاموش است سیستم نیز به حالت خاموش در میآید و با روشن شدن خودرو سیستم کروز کنترل تطبیقی به حالت اطلاعات اولیه بازمیگردد و سیستم در وضعیت ACC off قرار میگیرید.
برای فعالشدن سیستم راننده ابتدا با استفاده از کلید روشن/خاموش سیستم را در حالت آمادهبهکار قرار میدهد و سپس کنترل مسافت و سرعت را که انجام داد سیستم به حالت فعال درآمده و سرعت و مسافت را کنترل مینماید.
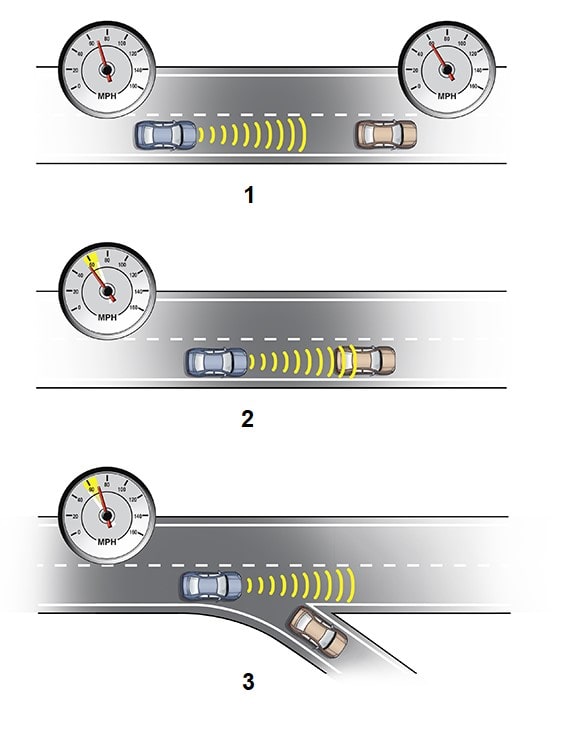 حالت 1: کنترل سرعت خودرو
حالت 1: کنترل سرعت خودرو
حالت 2: کنترل فاصله با خودروی جلویی
حالت 3: کنترل سرعت توأم با کنترل فاصله
شکل 6- حالتهای عملکردی سیستم کروز کنترل تطبیقی
عملکرد در این حالت معادل کنترل سرعت معمولی است. اگر هیچ وسیله نقلیه جلویی در فاصله زمانی یا فاصله سیستم وجود نداشته باشد، سرعت خودرو در سرعت تنظیمی موردنظر راننده حفظ میشود. سیستم کنترل موتور خروجی موتور را از طریق کنترل دریچه گاز کنترل میکند تا سرعت خودرو را در سرعت موردنظر حفظ کند.
در صورت قرارگرفتن خودرو در محدوده سنسورهای سیستم کروز کنترل تطبیقی، سیستم وارد حالت کنترل فاصله بین دو خودرو میشود. در این حالت ماژول ACC دستورات لازم را در مورد کاهش سرعت و حفظ فاصله ایمنی به ماژولهای موتور و ترمز ارسال مینماید. حداکثر مقدار شتاب منفی مجاز 0.2 g است. در هنگام کاهش سرعت ماژول ترمز چراغهای ترمز را نیز روشن مینماید.
در این حالت ماژول ACC با استفاده از سنسورها و پردازش اطلاعات فاصله بین دو خودرو را در محدوده مجاز کنترل مینماید. در این حالت در صورت نیاز به افزایش سرعت این ماژول دستورات لازم را برای ماژول موتور ارسال و خودرو با شتاب 0.2 g سرعت خودرو را افزایش میدهد و این عمل کنترل همزمان انجام میگیرد. در حالتی که خودرو و یا مانع از جلوی خودرو کنار رود سیستم دوباره در حالت تثبیت سرعت قرار میگیرد.
لازم به ذکر است سیستم کروز کنترل میتواند توسط راننده و یا فشردن پدال ترمز و یا کلاچ و همچنین سرعت زیر 40 کیلومتر در ساعت و وجود خطا در خود سیستم غیرفعال میگردد.
یکی از مهمترین قسمتهای سیستم کروز کنترل تطبیقی سنسورهای تشخیص موانع است که وظیفه شناسایی خودرو و موانع را بر عهده دارد.
 شکل 7- استفاده از رادار در جلو خودرو
شکل 7- استفاده از رادار در جلو خودرو
برخی از سیستمهای کروز کنترل تطبیقی برای تشخیص موانع از رادار بهره میبرند؛ در این نوع خودروها طراحان در بخش جلوی خودرو چند رادار تشخیصدهنده را نصب میکنند که معمولاً در یک قاب پلاستیکی پوشیده قرار میگیرند. این نوع از رادارها امواجی را به اطراف خودرو یا سایر موانع ارسال کرده و سپس اطلاعات دریافتی را نیز برای پردازش به کامپیوتر خودرو میفرستند.
لیزرها معمولاً پس از قرارگیری در یک جعبه سیاه در بخش مشبک جلوپنجره و پشت آرم خودرو نصب میشوند. در بسیاری از خودروهایی که از این تکنولوژی بهره میبرند، آرم خودرو بهگونهای طراحی شده تا با پخش اشعه لیزر بتواند اجسام جلوی خودرو را تشخیص داده و اطلاعات دریافتی را به ماژول ACC بفرستد.
 شکل 8- استفاده از سنسور تابش لیزری برای تعیین فاصله
شکل 8- استفاده از سنسور تابش لیزری برای تعیین فاصله
در خودروهای مجهز به دوربین، سیستم کروز کنترل تطبیقی اطلاعات میدانی را از دو دوربین که در پشت آینه وسط نصب شده است دریافت خواهد کرد. این دوربینها با تکنولوژیهای پیشرفته خود میتوانند اجسام مقابل خودرو را تشخیص دهند.
 شکل 9 – استفاده از دوربین برای تشخیص فاصله
شکل 9 – استفاده از دوربین برای تشخیص فاصله
خودروسازان در برخی از محصولات خود از چندین سنسور برای تشخیص موانع استفاده میکنند تا به کامپیوتر خودرو اطلاعات کاملی از اطراف ارسال شود. در واقع علاوه بر اطلاعات سنسورها، دادههای GPS و دوربینهای نصب شده در خودرو نیز به ماژول ACC ارسال خواهد شد.
در خودروهایی که از این سیستم برای تشخیص موانع بهره میبرند، در گام نخست نحوه حرکت خودروهای اطراف توسط چندین سنسور به کامپیوتر ارسال خواهد شد تا پس از پردازش اطلاعات بتواند حرکت خودروهای اطراف را پیشبینی کرده و بر اساس آنها خودرو را مورد کنترل خود قرار دهد.
نتیجهگیری
افزایش سطح ایمنی در خودروها بهعنوان مهمترین مزایای کروز کنترل تطبیقی محسوب میشود؛ چرا که خودروهایی که به این سیستم مجهز هستند، همواره با خودروی جلویی یک فاصله مشخص خواهند داشت و به همین دلیل حفظ فاصله میتواند از بسیاری از تصادفات جلوگیری کند. روانشدن جریان ترافیک نیز یکی دیگر از مزایای مهم این خودرو به شمار میرود.




")
