
چکیده
هدف از این پژوهش، تشخیص عیب و تعیین درصد سالم بودن چرخ دندههای گیربکس و یا جعبه دنده به کمک پیش پردازش ویولت و تحلیل شبکه عصبی می باشد. ابتدا جعبه دنده مورد نظر بر روی میز آزمون نصب گردید. سپس با تعریف شرایط آزمون در دنده 3 و حالت نیمه بار با دور 2500 دور بر دقیقه، به و سیله تجهیزات میز آزمون، سیگنالهای ارتعاشی مربوط به دو حالت سالم و معیوب جعبه دنده استخراج گردید. پس از آن سیگنال های ارتعاشی استخراج شده به کمک آنالیز ویولت پیش پردازش شده و آماده ورود به شبکه عصبی گردید. سپس با استفاده از سیستمهای شناسایی الگو، عملیات دسته بندی و جداسازی اطلاعات برای آموزش شبکه عصبی انجام گرفت. نتایج این پژوهش نشان می دهد که امکان شناسایی سالم و معیوب بودن جعبه دنده با درصد اطمینان 5/98 وجود دارد.
کلمات کلیدی : شبکه عصبی ، ویولت، پایش وضعیت، مجموعه دوار، جعبه دنده، خروجی درصدی
Fault diagnosis and determination the healthy status of gear box using wavelet and artificial neural network
Gholamhasan Payganeh [1], Seyed Hasan Aghamohammadi[2] ,Sayyad Nasiri[3]
[1]- Faculty member of Shahid Rajaee teacher Training University
[2]- Mechanics Master of Islamic Azad University, Tehran South
[3]- Faculty member of Sharif University of Technology
Abstract
This paper aims to detect defect, and determine the percentage of being healthy of gears in a gearbox with Wavelet transform pre processing and Artificial Neural Network (ANN) analysis. First of all, the intended gearbox was set up on the test bench. Then, the test conditions were defined including gear No. 3, half load and 2500 rpm. After that, vibration signals of the gearbox were extracted and recorded with sensors and equipment of the test bench for healthy and defect gear. Next, vibration signals were pre processed by Wavelet transform and got ready for entering to ANN. To train the ANN, data classification and separation were done by pattern recognition. Results of the present research show that it is possible to detect defective and healthy gearbox by reliability percentage 98.5.
Keywords: ANN. Wavelet, Condition monitoring, Rotating collections, Gear box, percent normal
مقدمه:
امروزه قابلیت اطمینان به یک مجموعه در حال حرکت و دواری که بار یک کارخانه و یا صنعت بر دوش آن است و یا قابلیت دسترسی به مجموعه معیوب و هزینه حفظ این قابلیتها از جمله نگرانیهای مدیران تولید در هر بنگاه تولیدی میباشد. با توجه به ابداع روشها و تجهیزات دارای دقت بالا و همچنین متدهای کاربردی مناسب برای ماشینآلات مختلف، استفاده از روش مبتنی بر پایش وضعیت به عنوان روشی مستقل و یا به صورت تلفیقی با روشهای دیگر، بسیار مورد توجه صنایع قرار گرفته است.
پایش وضعیت راهی براي تشخیص علائم فرسایش عادي یا خرابي آني دستگاه یا فرآیند در زمان مناسب براي دوري جستن از خرابي های اتفاقي است. به كمك پایش وضعیت مي توان وضعیت دستگاه را زیر نظر گرفته و در صورت انحرافهای پیاپي از رفتارهای عادي اقدام لازم براي برنامهریزي و بازدید یا تغییرات لازم در زمان مناسب را اتخاذ نمود. در صورتي که تا زمان اجراي هر مرحله از تغییرات زمان بندي شده دستگاهی بر اساس نتایج پایش وضعیت رفتار غیر عادي از خود نشان ندهد، آن دستگاه مورد بازدید قرار نميگیرد و به این ترتیب ميتوان حجم قابل توجهی از فعالیتهای نگهداري پیشگیرانه را كاهش داد. منظور از نگهداري و تعمیرات بر اساس پایش وضعیت عبارت است از به دست آوردن علائم و نشانه هایي از وضعیت سیستم و یا ماشین در حال كار، تا دستگاه بتواند در یك شرایط ایمن و اقتصادي به كار ادامه دهد یا مورد تعمیر واقع شود. تکنيک هاي عيب يابي اتوماتيک براي تشخيص عيوب ابتدائي ماشين آلات دوار از جمله گیربکس به منظور جلوگيري از ضررهاي جاني و مالی، افزايش کيفيت و نرخ توليد به کار برده مي شوند. گيربکسها به طور گسترده در بخش وسيعي از صنايع، به عنوان مثال در وسایل نقليه و ماشين هاي ابزار مورد استفاده قرار گرفته و در عيب يابي اتوماتيک توسط تست هاي غير مخرب مورد توجه فراوان قرار گرفته اند. گيربکس ها به طور کلي از سه جزء اصلي چرخدنده، بلبرينگ و شفت تشکيل مي شوند به طوری که در حدود ۶۰ % از عيوب آنها در چرخدنده ها اتفاق مي افتد. روش هاي متعددي براي سیستم پایش وضعیت ابداع و متداول شده است که از آن جمله مي توان به تحلیل روغن، تحلیل ارتعاشات، تحلیل صوت، تحلیل دمایی و امثال آن اشاره کرد. این تحلیلها برای عیبیابی نیاز به پروسههای محاسباتی دارند و از طرفی نیاز سیستم های صنعتي در راستای کاهش هزينه هاي تعميرات و نگهداري، منجر به توسعه روشهاي جديد عيب يابي شامل: روشهاي بر پايه مدل ديناميکي، آناليز آماري چند متغيره، منطق فازي، الگوريتم ژنتيک و شبکه هاي عصبي مصنوعي شده است.
امروزه ارتعاشات ماشینهای دوار به عنوان مطمئن ترین روش برای تشخیص عیب مورد نظر قرار گرفته شده است و دستگاه های مربوط به اندازه گیری ارتعاشات، ثبت و آنالیز آن توسعه زیادی یافته اند. در اوايل ۱۹۹۰ لدوک براي آناليز نويزهاي يک سيستم پمپ سانتريفيوژ از آناليز ويولت استفاده کرد. اين ممکن است اولين مقاله اي باشد که در اين زمينه به چاپ رسيده است. وانگ و مک فادن براي آناليز سيگنال هاي ارتعاشي چرخدندهها که يکي از مهمترين اجزاء ماشين مي باشند، از ويولت استفاده کردند و دریافتند که ويولت براي کشف انواع عيوب ايجاد شده در مراحل ابتدائي عيب مناسب مي باشد. مامو و دياس دو تبديل فوريه و ويولت را براي استخراج ويژگي، به منظور عيب يابي يک سيستم توزيع قدرت استفاده کردند و دريافتند که نتايج ويولت بسيار بهتر از فوريه است. مقالات منتشر شده در اين زمينه کارائي بالاي آناليز ويولت را در شناسائي عيوب تاييد کرده و نشان مي دهند که اين روش بر بسياري از شیوه های ديگر برتري دارد. کازلاس و همکارانش عيوب چرخدنده و بلبرينگ گيربکس يک هلي کوپتر را با استفاده از يک شبکه عصبی پرسپترون دو لايه تقريبا پيچيده با ۶۰ نرون در لايه ورودي، ۶۰ نرون در لايه مخفي و ۹ نرون در لايه خروجي طبقه بندي کردند. آنها از تبديل فوريه سريع براي استخراج بردار ويژگي شبکه عصبي در کار خود استفاده کردند. سامانتا در سال ۲۰۰۳، يک روش جديد براي مقايسه کارائي سيستم عيب يابي چرخدنده، با استفاده از شبکه عصبي و ماشين بردار پشتيبان که انتخاب مشخصه هاي ورودي توسط الگوريتم ژنتيک بهينه شده بود، ارائه داد. او از سيگنال هاي ارتعاشي يک گيربکس در حوزه زمان با چرخدنده هاي نرمال و معيوب براي پيش پردازش به منظور استخراج بردار ويژگي شبکه عصبی استفاده کرد. مشخصه هاي استخراج شده از سيگنال هاي اصلي و پيش پردازش شده به عنوان ورودي براي هر دو طبقه بندي کننده به کار برده شدند. استفاده از الگوريتم ژنتيک فقط با شش عضو در بردار مشخصه براي هر دو طبقه بندي کننده ماشين بردار پشتيبان و شبکه عصبي کارائي ۱۰۰ % را نشان داد و اين نشان دهنده کارائي بالاي هوش مصنوعي در مانيتورينگ ماشين آلات دوار است.
در سال هاي اخير، شبکه عصبی مصنوعی ( ANN ) در رشته هاي مختلف از جمله مهندسي خودرو، در پيش بيني ويژگي هاي خودرو در شرايط كاري متفاوت به كار رفته است. در سال 2005 ساکسنا و همکارانش با استفاده از الگوریتم ژنتیک، پارامترهای طراحی بهینه سیستمهای عیب یابی بر پایه شبکه های عصبی مصنوعی برای پایش وضعیت سیستمهای مکانیکی مشخص شده اند. آنها نشان دادند که الگوریتم ژنتیک می تواند برای انتخاب زیر مجموعه های کوچکتر از ویژگیهایی که به صورت ژنتیکی یک خانواده مناسب را برای عیب یابی موفق و دسته بندی تشکیل می دهند، استفاده شود. در سال 2002 آدریان کاک از دو روش آنالیز ویولت و توزیع واینر- ویل برای تشخیص آسیب در هلیکوپتر استفاده کرد و یک روش به نام معیار فیشر برای مقایسه این دو روش و میزان اثر بخشی آنها بکار برد. در سال 2009 عنایت حلیم روشی جدید برای تشخیص عیوب چرخدنده گیربکس” میانگین گیری حوزه زمان در تمام مقیاس ها ارائه کرد. همچنین کاربرد روش تبدیل گسسته ویولت در تشخیص عیوب چرخ دنده بررسي و مقایسه گرديد. در سال 1999 هوگوت گریملیوس و همکارانش سه روش کاملا به روز برای پایش وضعیت به شرح ذیل ارائه کردند: روش استخراج ویژگی، روش اصول یا قوانین اولیه، شبکه عصبی.
در سال 2006 رفیعی و همکارانش به صورت تجربي به بررسي يک سيستم تشخيص و طبقه بندي عيوب ناشي از چرخدنده و بلبرينگ در يک گيربکس توسط تست غيرمخرب، با استفاده از شبکه هاي عصبي مصنوعي پرداختند. سیگنال های ارتعاشی اندازه گیری شده توسط درون يابي تکه اي مکعبي هرميت هم بعد شدند. سيگنال هاي هم بعد شده، با ايجاد يک بردار ويژگي کاملا جديد که از محاسبه انحراف استاندارد ضرايب ويولت گسسته به دست آمد، به عنوان ورودي به شبکه عصبي اعمال شد. شکستگي يک دندانه در چرخ دنده، سايش متوسط و سايش کم چرخدنده، بلبرينگ معيوب و حالت سالم گيربکس به عنوان نرون هاي خروجي در شبکه قرار گرفتند. سرانجام شبکه پرسپترون دو لايه با ساختار ۶:۲۵:۵ و با کارائي 34/98 برای عیب يابي گيربکس ارائه گرديد. آنها نشان دادند که ضرایب ویولت برای تشخیص عیوب سایش و شکستگی چرخدنده بسیار مناسب و کارا می باشد.
در سال 2009 ژو کونپنگ و همکارانش روشهای به روز آنالیز ویولت برای پایش وضعیت را ارائه کرده و بیان کردند که آنالیز ویولت امروزه مهمترین ابزار پردازش سیگنال غیر ایستا است.
در پژوهشهای فوق روش هاي مختلفي بررسي شده و نتايج قابل توجهي كسب گرديده است. اما رسيدن به يك درصد اطمينان با كمك شبكه عصبي مصنوعي براي حالت اعلام درصدی برای سالم بودن یک مجموعه دوار كه در صنعت ايفاي نقش مي كنند، دور از دسترس نيست. به اين منظور، در اين مقاله، جدای از مسائل دریافت سیگنال و پیش پردازش که در جای خود اهمیت ویژه ای دارند، ما در این مجال به موضوع تعیین درصدي براي خروجي شبكه عصبي مصنوعي بیش از دیگر موارد اشاره داریم و امیدواریم در این راستا مواردی چند ناچیز را اعلام نماییم. این آزمایش در دنده 3 و حالت نیمه بار و دورrpm 2500 برای ورود به جعبه دنده برای آزمایش و نمونه گیری انتخاب گردید. سیگنالهای ارتعاشی مربوطه را به کمک یک سنسور ارتعاش سنج که بر روی بدنه جعبه دنده نصب شده است، به دست آورده که مربوط به دو نوع، حالت سالم و حالت دارای عیب و نویز در جعبه دنده از قبل تعیین و در شرایط واقعی و تحت بار معرفی شده، تا با استفاده از میز آزمون جعبه دنده سیگنال ها استخراج گردند. شرایط این میز آزمون به نحوی است که با استفاده از سه موتور الکتریکی، یکی بر روی محور ورودی و دوتا روی محور خروجی، شرایط واقعی ایجاد می گردد. این شرایط با تعیین مقدار بار و دور ورودی برای ورود به جعبه دنده و تعیین نسبت دنده های مختلف جعبه دنده و انتخاب دنده مورد نظر برای تست، خروجی دستگاه (دور و گشتاور) را اعلام نموده و آماده شروع تست می باشد. سپس با کمک کارت آنالوگ به دیجیتال و نرم افزار دلفی اطلاعات ارسالی از سنسور در کامپیوتر ثبت می گردد. سپس با کمک آنالیز ویولت، اطلاعات را پیش پردازش کرده و آماده ورود به شبکه عصبی گردید. پس از آن با استفاده از سیستم های شناسایی الگو، عملیات دسته بندی و جداسازی اطلاعات برای آموزش شبکه عصبی انجام گردیده و سپس آموزش شبکه عصبی با این اطلاعات صورت گردید. در انتها با استفاده از اطلاعات ذخیره شده، آزمایش شبکه عصبی انجام پذیرفت. در این شبکه عصبی، خروجی شبکه عصبی را به صورت دیتایی 20 تایی (متشکل از صفر و یک) تعریف نموده ایم. در این تعریف، خروجی شبکه عصبی بین 0.8 تا 1 را 1 تعریف کرده و خروجی بین 0 تا 0.2 را صفر در نظر داریم. در شبکه عصبی تمام خروجیها که مربوط به حالت سالم می باشد یک تعریف نموده و برای حالت معیوب ، صفر تعریف گردید. این شیوه کم نظیر برای انتخاب درصد برای خروجی شبکه عصبی، حالت سالم را 100% اعلام نموده، زیرا تمام خروجی ها یک در نظر گرفته شده است و برای حالت معیوب نیز 0 % اعلام نموده است. نتایج این تحقیق نشان می دهد که امکان شناسایی حالت سالم بودن و یا معیوب بودن و پیدایش نویز در جعبه دنده در این شبکه عصبی مصنوعی با درصد اطمینان 5/98 وجود دارد.
روش انجام آزمایش
با توجه به شکل 1، در این تحقیق از سنسور ارتعاش سنج سه محوره نصب شده بر روی پوسته گیربکس جهت داده برداری از سیگنال های ارتعاشی استفاده شد. میز آزمایش مورد استفاده جهت آزمایش گیربکس در شکل 2 ملاحظه می گردد.
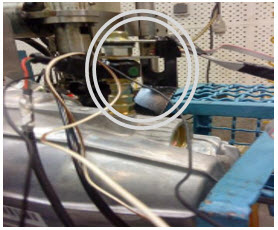
شکل 1: محل نصب سنسور
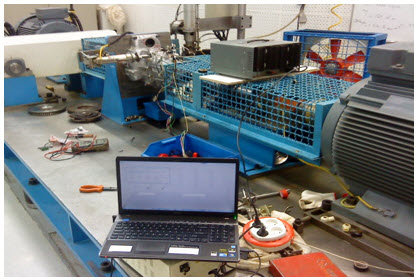
شکل 2: میز آزمون گیربکس
مطابق شکل های 3 و 4، سیگنال های خروجی سنسور به وسیله دستگاه تبدیل آنالوگ به دیجیتال جمع آوری و با کمک نرم افزار دلفی اطلاعات ارسالی از سنسور در کامپیوتر ثبت می گردد. سپس با استفاده از نرم افزار Matlab کد نویسی شبکه عصبی انجام و نتایج استخراج گردید. اين آزمايش در دور rpm2500 و گشتاور متوسط ( نیمه بار) و دنده3 انجام گردید.
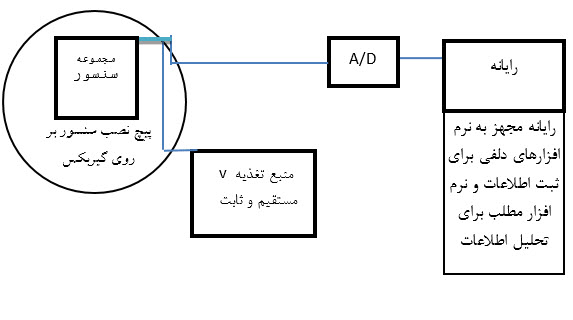
شکل3 : نمای الکتریکی میز آزمون
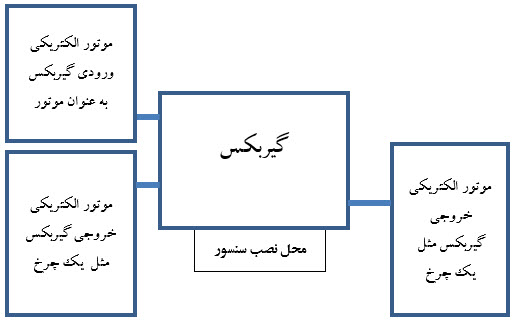
شکل4: نمای مکانیکی دستگاه دینامومتر
روند کلی انجام این تحقیق در شکل 5 نشان داده شده است.
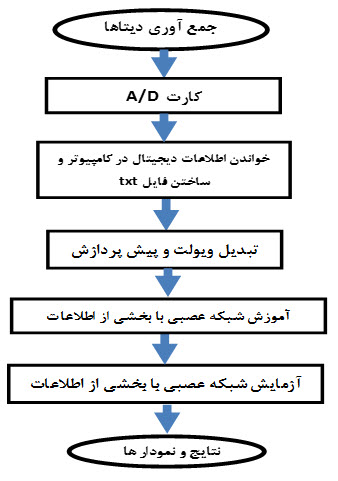
شکل 5: فلوچارت روند کلی انجام تحقیق
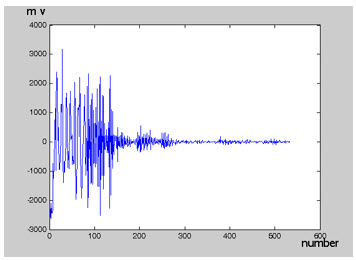
شکل 6 بخشی از یکی از اطلاعات دریافتی و تفکیکی از حالت جهبه دنده معیوب دارای نویز را نشان میدهد که نابسامانی های کمی در بازه های زمانی رخ می دهد و در شکل 7 خروجی ویولت آن ارائه شده است. در این شکل نابسامانی کمی را در مراحل مختلف ویولت نشان می دهد.
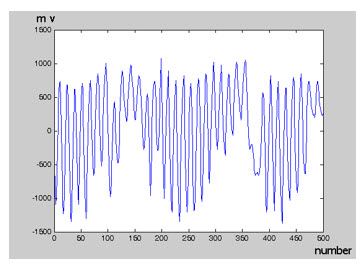
شکل 6: دیتای گرفته شده از سنسور ارتعاش سنج متصل به گیربکس معیوب دارای نویز
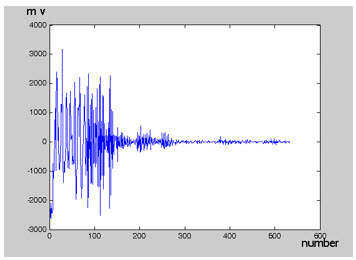
شکل 7: خروجی ویولت برای دیتای گیربکس معیوب دارای نویز
شکل 8 بخشی از نمونه ای از اطلاعات دریافتی و تفکیکی از حالت جعبه دنده سالم را نشان میدهد. در این شکل کمترین نا بسامانی را ثبت کرده است که خروجی ویولت آن در شکل 9 آورده شده است و در این شکل در تمام مراحل ویولت کمترین نابسامانی دیده می شود.
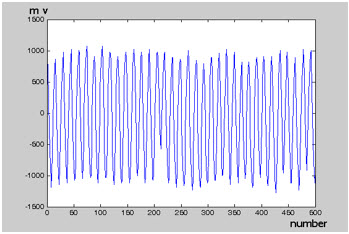
شکل 8: دیتای گرفته شده از سنسور ارتعاش سنج متصل به گیربکس سالم
شکل9: خروجی ویولت برای دیتای گیربکس سالم
شبکه عصبی
پس از تحلیل نتایج اولیه و پیش پردازش انجام شده، در این قسمت با استفاده از سیستم های بازشناسایی الگو، عملیات دسته بندی و جداسازی اطلاعات انجام گرفت. نوعی از شبکههای عصبی [1] BP بر مبنای واحد محاسباتی به نام پرسپترون ساخته شد. معمولا الگوریتم BP پیش از خاتمه، هزاران بار با استفاده از همان داده های آموزشی تکرار میگردد، شرط های مختلفی به شرح ذیل را میتوان برای خاتمه الگوریتم بکار برد: توقف بعد از تکرار به دفعات معین، توقف وقتی که خطا از یک مقدار تعیین شده کمتر شود، توقف وقتی که خطا در مثالهای مجموعه مورد تائید از قاعده خاصی پیروی نماید. پرسپترون، برداری از ورودیها با مقادیر حقیقی را گرفته و ترکیبی خطی از این ورودیها را محاسبه میکند. حاصل آن اگر از حد آستانه بیشتر باشد، خروجی پرسپترون را یک و در غیر این صورت منفی یک در نظر میگیرد. با توجه به شکل 10 شبکه های عصبی مصنوعی یاد می گیرند که مسئله ای را حل کنند و در واقع برنامه ریزی قبلی نمی شوند. کار شبکه عصبی تنظیم وزن های ورودی هر نرون عصبی می باشد تا باعث یادگیری کل یک شبکه عصبی (طبقه بند) بشود. شبکه های عصبی می توانند با ناظر یا بدون ناظر باشند و نیز می توانند دارای لایه های متعدد بوده و یا تک لایه باشند. در این پژوهش از یک شبکه عصبی که به آن یک طبقه بند گفته میشود استفاده شده، این شبکه عصبی از نوع با ناظر و دارای یک لایه پنهان می باشد. برای کسب نتایج بهتر می توان نتایج چند طبقه بند مجزا را برای کارایی بیشتر شبکه عصبی با هم به صورت استاتیکی و یا دینامیکی ترکیب کرده و نتایج بهتری را از شبکه عصبی کسب کرد.
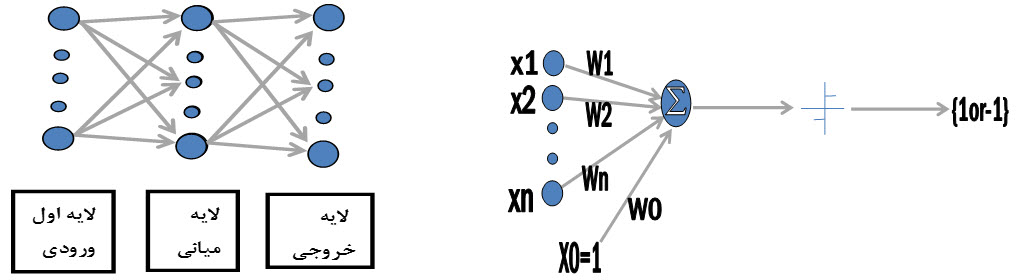
شکل 10- شبکه عصبی با یک لایه مخفی و مدل ریاضی نرون
شروع تست می گردد. این تست در دنده 3 و حالت نیمه بار و دور 2500rpm برای ورود به جعبه دنده، جهت آزمایش و نمونه گیری انتخاب گردید. سیگنال های ارتعاشی مربوطه را به کمک یک سنسور ارتعاش سنج که بر روی بدنه جعبه دنده نصب شده است، به دست آورده و استخراج گردید.اطلاعات دریافتی با کمک ویولت (بدست آوردن تابع ویژگی سیگنال) به اطلاعات مفیدتری برای ورود به شبکه عصبی تبدیل گردید. سپس آموزش شبکه عصبی مصنوعی با نیمی از اطلاعات فوق انجام شد و آزمایش شبکه عصبی با نیم دیگر اطلاعات صورت پذیرفت.جدول 1 براي رسيدن به اهداف تعيين شده شبكه عصبي تعريف گرديد و سپس با اين خروجي نسبت به آموزش شبكه عصبي اقدام گرديد. بعد از آموزش شبكه عصبي، آزمايش شروع مي گردد. جدول 2 خروجي آزمايش شبكه عصبي مي باشد كه بنا به هر نوع خروجي نوع ورودي اعلام مي گردد و نتايج آن بررسي مي گردد. برای خروجی شبکه عصبی مصنوعی جهت آموزش یک کد 20 تایی (صفر و یک ) مطابق جدول 1(جهت آموزش) مشخص گردید. از ویژگی های این نوع خروجی، بهره گیری از درصد برای نشان دادن میزان سالم بودن یک جعبه دنده است. مطابق جدول 2 در هنگام آزمايش در جعبه دنده سالم تمام 20 دیتای خروجی شبکه عصبی (یا اکثر اعداد خروجی) یک است که میزان سالم بودن جعبه دنده را به درصد (100٪ تا 80٪) نشان می دهد. در جعبه دنده معیوب نیز تعداد 10 تا از اطلاعات خروجی شبکه عصبی صفر و ده تا اطلاعات دیگر یک است که میزان سالم بودن دنده را 0٪ و میزان معیوب بودن آن را نیز 100٪ نشان می دهد. در برنامه نوشته شده در هنگام آزمایش در خروجی شبکه عصبی بازه 1 تا 8/0 را یک و بازه 2/0 تا 0 را صفر تعیین نموده ایم.
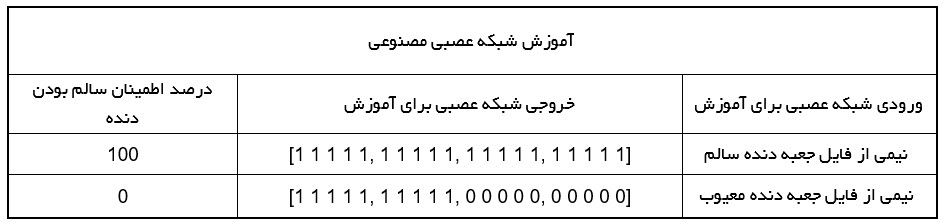
جدول 1: آموزش شبکه عصبی با یک لایه مخفی و مدل ریاضی خروجی نرون
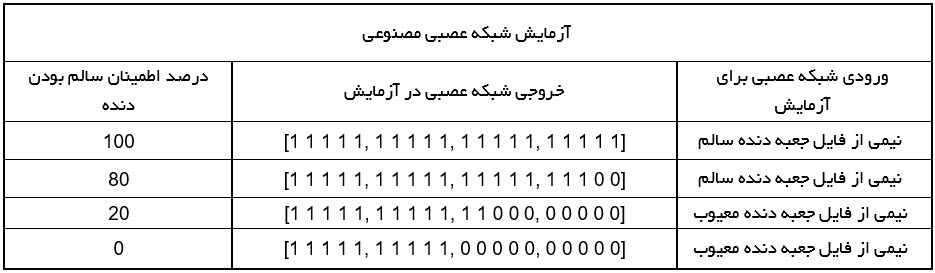
جدول 2: آزمایش شبکه عصبی با یک لایه مخفی و مدل ریاضی خروجی نرون
آموزش شبکه عصبی با نیمی از اطلاعات با 1000 مرتبه آموزش صورت پذیرفت و وزن نرونهاي لايه هاي مختلف شبكه عصبي، بهينه گشته و قادر به شناسايي اطلاعات ورودي گرديد. سپس در انتها، آزمایش شبکه عصبی با نیمی دیگر از اطلاعات صورت پذیرفت و نتایج حاصل از این آزمایش (با میانگین 20 آزمایش) 5/98 درصد توانست بازشناسایی را انجام دهد. شکل 11 خروجی شبکه عصبی برای شناسایی جعبه دنده معیوب می باشد، این شکل یکی از 20 آزمايش را نشان می دهد كه داراي نتیجه 100 درصدي در بازشناسی مي باشد. شکل 12 خروجی شبکه عصبی برای شناسایی جعبه دنده سالم می باشد، در این شکل نيز یکی از نتایج مراحل بازشناسی که نتیجه 100 درصدی را دارا است، به نمایش گذاشته شده است. بنا به نتایج به دست آمده در هنگام آزمایش، اختلاف جواب آزمایش با آموزش کمتر از یک دهم می باشد.
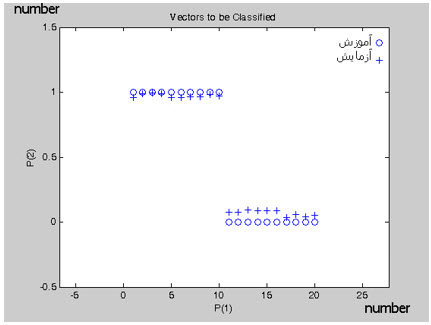
شکل 11: مقایسه خروجی آموزش (علامت دایره) و آزمایش (علامت مثبت) شبکه عصبی برای حالت جعبه دنده معیوب
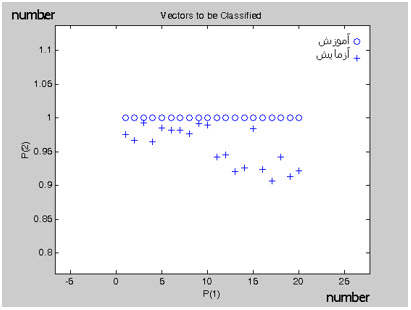
شکل 12: مقایسه خروجی آموزش(علامت دایره) و آزمایش(علامت مثبت) شبکه عصبی برای حالت جعبه دنده سالم
ویژگیهای شبکه عصبی استفاده شده در این پژوهش به شرح ذیل در جدول 3 میباشد : تعداد دیتا در هر فایل ورودی 500 مورد و لايه مياني شبكه عصبي داراي 40 نرون و لايه خروجي شبكه عصبي داراي 20 نرون مي باشد. تعداد تكرار براي آموزش 1000 مرتبه و ضريب خطا 02/0 مي باشد.
نتیجه:
از نتایج شبکه عصبی مصنوعی آموزش دیده شده میتوان به شکلهای مختلفی استفاده کرد. به عنوان مثال در خروجی این شبکه عصبی با گرفتن درصد از تعداد یکها میتوان درصدی از سالم بودن جعبه دنده را به نمایش گذاشت که این موضوع در بحث پیش بینی میزان عیوب و کارآیی جعبه دنده ها بسیار حائز اهمیت بوده و از این طریق می توان عمر مفید جعبه دنده ها را تخمین زد و از بروز آسیب های جانی و مالی جلوگیری کرد. در اینجا دو دسته از اطلاعات را با یکدیگر مقایسه نموده و میزان تغییرات در آن و وجود خرابی را با توجه به شرایط اولیه موجود تعریف و تعیین نموده ایم. در تحقیقات بیشتر در آینده میتوان تعداد حالات و درصدها را نیز بنا به شرایط موجود آزمایش بیشتر کرده و برای موارد دیگر نیز تعریفی خاص آماده کرد تا در خروجی شبکه عصبی نتایج بیشتری را بتوان به دست آورده و نمایش داد. در انتهای شبکه عصبی با دریافت خروجی به صورت یک کد صفر و یک 20 تایی، بعد از آموزش حالت ها، آزمایش دیتاها صورت پذیرفت. این شیوه کم نظیر برای انتخاب درصد برای خروجی شبکه عصبی، حالت سالم را 100% گرفته، زیرا تمام خروجی ها یک در نظر گرفته شده است و برای حالت معیوب نیز 0 % اعلام نموده است. با توجه به این نکته که در کل شکل های ترسیم شده که یکی از نتایج 100% را کسب کرده، حداکثر تغییرات خروجی انتهای شبکه عصبی از صفر و یک 1/0 بوده و در مواردی با اختلاف کمتر از 001/0 از صفر و یک به دست آمده است. نتایج این تحقیق نشان می دهد که امکان شناسایی سالم بودن یا معیوب بودن و پیدایش نویز در جعبه دنده در این شبکه عصبی مصنوعی با درصد اطمینان 5/98 وجود دارد.
مراجع:
[1] Wuxing L., Tse Peter W., Guicai Z., Tielin S., Classification of gear faults using cumulants and the radial basis function network, Mechanical systems and signal processing, 2004, vol. 18, pp. 381-389.
[2] Yesilyurt I., The application of the conditional moments analysis to gearbox fault detection-a comparative study using the spectrogram and scalogram, NDT&E International, 2004, vol. 37, pp. 309-320.
[3] Howard I., Jia S., Wang J., The dynamic modeling of a spur gear in mesh including friction and a crack, Mechanical systems and signal processing, 2001, vol. 15(5), pp. 831-853.
[4] Parker JR B. E., Ware H. A., Wipe D. P., Tompkins W. R., Clark B. R. and Larson E. C., Fault diagnostics using statistical change detection in the bi-spectral domain, Mechanical systems and signal processing, 2000, vol. 14(4), pp. 561-570.
[5] Lou X., Loparo K. A., Bearing fault diagnosis based on wavelet transform and fuzzy inference, Mechanical systems and signal processing, 2003, vol. 18, pp. 1077-1095.
[6] Samanta B., Al-Balushi K.R., Al-Araimi S.A., Artificial neural networks and support vector machines with genetic algorithm for bearing fault detection, Engineering Applications of Artificial Intelligence, 2003, vol. 16, pp. 657-665.
[7] Yang D.M., Stronach A.F., MacConnell P., Penman J., Third-order spectral techniques for the diagnosis of motor bearing condition using artificial neural networks, Mechanical systems and signal processing, 2002, vol. 16(2–3), pp. 391-411.
[8] Enayet B. Halim. FAULT DETECTION AND DIAGNOSIS OF ROTATING MACHINERIES. University of Alberta . 2009.
[9] Abhinav Saxena , Ashraf Saad. Evolving an artificial neural network classifier for condition monitoring of rotating mechanical systems. Applied Soft Computing. 7 (2007) 441–454
[10] Hugo T. Grimmelius, Peter P. Meiler, Hans L. M. M. Maas, Bas Bonnier, Jasper S. Grevink, and Robert F. van Kuilenburg. Three State-of-the-Art Methods for Condition Monitoring. IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS. VOL. 46, NO. 2, APRIL 1999
[11] J. Rafiee , F. Arvani , A. Harifi , M. H. Sadeghi. Intelligent condition monitoring of a gearbox using artificial neural network. Mechanical Systems and Signal Processing. 2006. 21 (2007) 1746–1754
[12]Peng Z.K., Chu F.L., Application of the wavelet transform in machine condition monitoring and fault diagnostics: a review with bibliography, Mechanical systems and signal processing, 2004, vol. 18, pp. 199-221.
[13] Wang W.J., McFadden P.D., Application of the wavelet transform to gearbox vibration analysis, American Society of Mechanical Engineers, Petroleum Division (Publication) PD 52, 1993, pp.13-20.
[14]Momoh J.A., Dias L.G., Solar dynamic power system fault diagnostics, NASA Conference Publication 10189, 1996, p. 19.
[15] Zhu Kunpeng , WongYoke San , Hong Geok Soon. Wavelet analysis of sensor signals for tool condition monitoring: A review and some new results. International Journal of Machine Tools & Manufacture . 2009. 49 537–553
[16]Kazlas Peter T., Monsen Peter T., and LeBlanc Michael J., Neural network-based helicopter gearbox health monitoring system, Neural networks for signal processing III. Proceedings of the IEEE-SP workshop, 6-9 Sept., 1993, pp. 431- 440.
[17] Adrian I. Cuc. Vibration-Based Techniques for Damage Detection and Health Monitoring of Mechanical
Systems. bachelor of Science. “Politehnica” University of Timisoara . 2002.
غلامحسن پایگانه[1] ،سید حسن آقامحمدی[2] ، صیاد نصیری[3]
[1]- عضو هیئت علمی دانشگاه تربیت دبیر شهید رجایی
[2]- کارشناسی ارشد رشته مکاترونیک دانشگاه آزاد اسلامی واحد تهران جنوب
[3]- عضو هیئت علمی دانشگاه صنعتی شریف





