AMEG | ایمگ
( Auto Motive Engineering Group) به معنی گروه مهندسی مکانیک خودرو میباشد.
برگزار کننده دورههای آموزش مکانیک خودرو ویژه بازار کار

آموزش حوزههای مختلف سیستمها و مکانیزمهای خودرو
طراحی، بهبود و توسعه برخی سیستمها و مکانیزمهای خودرو
طراحی، بهبود و توسعه تجهیزات آزمایشگاهی خودرو
طراحی، بهبود و توسعه شبیه سازهای آزمایشگاهی و آموزشی
طراحی، استانداردسازی و راه اندازی مراکز فروش و خدمات پس از فروش خودرو
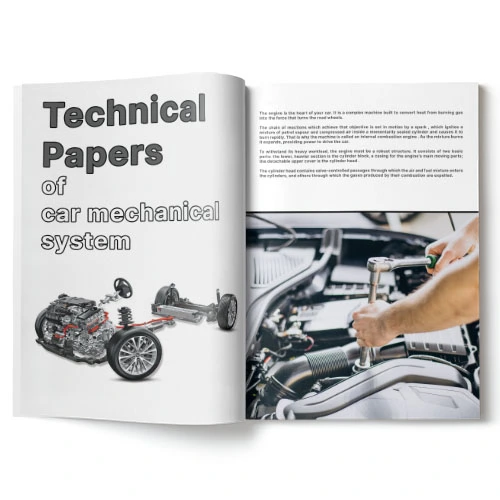
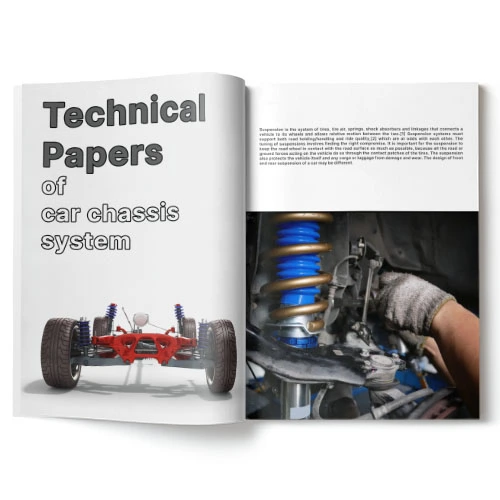
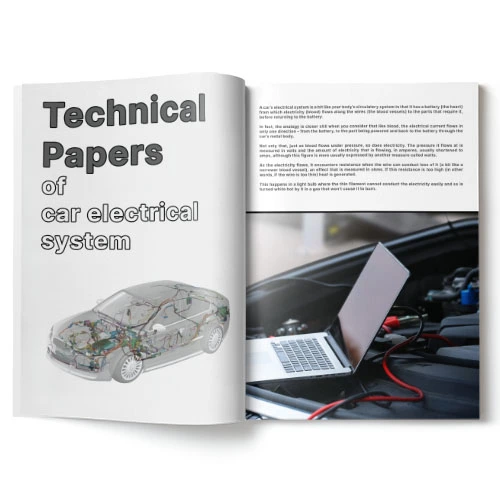
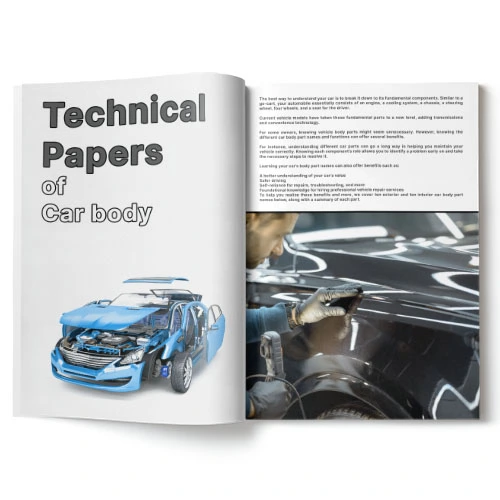
تدوین کتب، مقالات و مستندات فنی خودرو
امید است که با توکل به خداوند متعال و همت متخصصان این حوزه، گامی موثر در جهت آموزش نیروی انسانی متخصص و توسعه پژوهشهای تقاضا محور برداشته شود

گروه فنی و مهندسی ایمگ با بهرهمندی از دانش و تجربیات متخصصان کشور عزیزمان در حوزه های مختلف خودرو و تعامل سازنده با خودروسازان تراز اول کشور، قطعه سازان مختلف و همچنین دانشگاهها و مراکز آموزش عالی مطرح کشور در زمینههای ذیل نقش ایفا نموده است:



کارگاههای آموزشی ایمگ
کارگاههای آموزشی سیستمهای مکانیکی
دورههای آموزشی مرتبط با
-
- مبانی مکانیک خودرو
- تعمیرات موتور هیوندای و کیا
- تعمیرات موتورهای داخلی
- تعمیرات موتور BMW
- تعمیرات گیربکسal4
- تعمیرات گیربکس CVT
- تعمیرات گیربکس هیوندای و کیا
و غیره به همراه سرفصلهای آموزشی، مدت زمان برگزاری، هزینه دوره و غیره قابل مشاهده و بررسی میباشد. برای کسب اطلاعات بیشتر کلیک کنید.

کارگاههای آموزشی سیستمهای برقی
دورههای آموزشی مرتبط با
-
- برق خودروهای داخلی
- مالتی پلکس
- انژکتور خودروهای داخلی
- برق و انژکتور هیوندای و کیا
- تعمیرات ایسیو مقدماتی و پیشرفته
- ریمپ و تیونینگ مقدماتی و پیشرفته
- عیبیابی مقدماتی و پیشرفته BMW
و غیره به همراه سرفصلهای آموزشی، مدت زمان برگزاری، هزینه دوره و غیره قابل مشاهده و بررسی میباشد. برای کسب اطلاعات بیشتر کلیک کنید.

مجله فنی مهندسی ایمگ