
استپر موتور،عملکرد و عیبیابی آن
استپر موتور (موتور پله ای، موتور گام زن)، عملگری است که با گرفتن دستور از واحد کنترل مربوطه، دوران یا تغییر مکان های بسیار دقیق را ایجاد می کند. استپر موتورها در سه نوع استپر موتور با آهنربای دائم، استپر موتور با میدان مغناطیسی متغیر و استپر موتور ترکیبی (هیبرید) که ترکیبی از دو حالت قبل می باشد، ساخته می شوند. ولی به دلیل آنکه در خودرو بیشتر از استپر موتور با آهنربای دائم استفاده می گردد، به تشریح عملکرد این نوع استپر موتور پرداخته می شود
آنچه در این مقاله خواهید خواند...
شکل زیر برش خورده استپر موتور با آهنربای دائم را نشان می دهد.
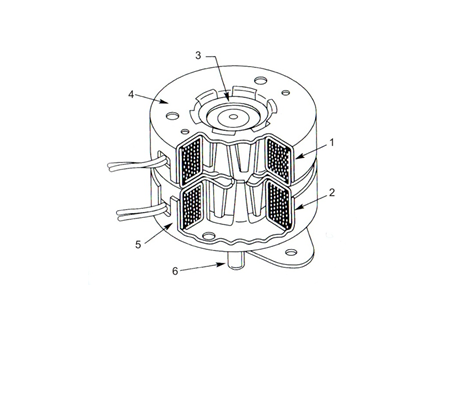
1: سیم پیچ A 2: سیم پیچ B 3: روتور
4: استکانی سیم پیچ A 5: استکانی سیم پیچ B 6: شفت خروجی
استپر موتور با آهنربای دائم
همانگونه که ملاحظه می گردد، این نوع استپر موتور از دو سیم پیچ و یک روتور تشکیل شده است. روتور این نوع استپر موتور آهنربای دائم می باشد که در شکل زیر ملاحظه می گردد.
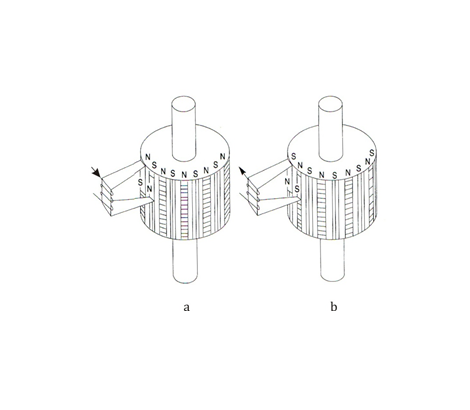
a : گام (استپ) اول b : گام (استپ) دوم
روتور استپر موتور از نوع آهنربای دائم
با توجه به شکل فوق، اگر جریان برق از قسمت بالای سیم پیچ وارد و از قسمت پایین آن خارج شود (حالت a) قسمت بالای هسته سیم پیچ به قطب S و قسمت پایین آن به قطب N تبدیل می شود. در این صورت قطب S سیم پیچ، قطب N روتور و قطب N سیم پیچ، قطب S روتور را جذب می کند. بنابراین روتور به اندازه یک گام (مرحله یا استپ) می چرخد.
چنانچه مطابق حالت b، جریان برق از قسمت پایین سیم پیچ وارد و از قسمت بالای این سیم پیچ خارج شود، قسمت بالای هسته سیم پیچ به قطب N و قسمت پایین آن به قطب S تبدیل می شود. در این صورت نیز قطب N سیم پیچ، قطب S روتور و قطب S سیم پیچ، قطب N روتور را جذب نموده و روتور به اندازه یک گام دیگر می چرخد. برای ایجاد گام های بعدی نیز این دو مرحله به ترتیب تکرار می گردد.
بزرگترین مزیت این نوع استپر موتور این است که روتور، آهنربای دائم است و بنابراین به زغال نیاز ندارد. در حالی که عیب بارز این نوع استپر موتور، تولید گشتاور کم می باشد و از اینرو در مواردی که نیاز به گشتاور بالا است، نمی توان از آن استفاده نمود.
نحوه عملکرد و عیبیابی
شکل زیر، استپر موتوری را نشان می دهد که روتور آن دارای 6 قطب و استاتور آن دارای 4 قطب می باشد.
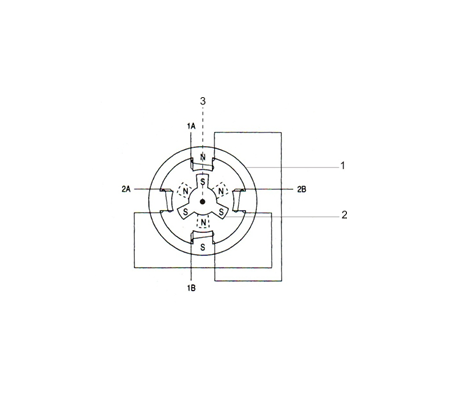
1: استاتور 2: روتور 3: خط شاخص
1A و 1B : ورودی و خروجی به سیم پیچ اول استاتور 2A و 2B : ورودی و خروجی به سیم پیچ دوم استاتور
استپر موتور با روتور 6 قطبی و استاتور 4 قطبی
زاویه بین خط مرکزی هر قطب روتور با خط مرکزی قطب مجاور از رابطه زیر قابل محاسبه است.
α=360′/NR
α: زاویه بین خط مرکزی هر قطب روتور با خط مرکزی قطب مجاور روتور
NR: تعداد قطب های روتور
از طرفی زاویه بین خط مرکزی هر قطب استاتور با خط مرکزی قطب مجاور استاتور از رابطه زیر محاسبه می شود.
β=360′/NS
β: زاویه بین خط مرکزی هر قطب استاتور با خط مرکزی قطب مجاور استاتور
NS :تعداد قطب های استاتور
حال می توان از طریق رابطه زیر مقدار زاویه دوران روتور را در هر گام (استپ) محاسبه نمود.
|β-α |=
Υ : زاویه دوران روتور در هر گام (استپ)
از طریق رابطه زیر نیز می توان تعداد گام های استپر موتور، برای یک دور گردش کامل روتور را محاسبه نمود.
Ν=360′/Y
Ν : تعداد استپ ها یا گام ها برای یک دور گردش کامل روتور
با توجه به شکل فوق، ملاحظه می شود که این استپر موتور دارای روتور 6 قطبی و استاتور چهار قطبی می باشد. بنابراین از طریق روابط فوق می توان تعداد گام (استپ) ها و زاویه دوران روتور در هر استپ را محاسبه نمود:
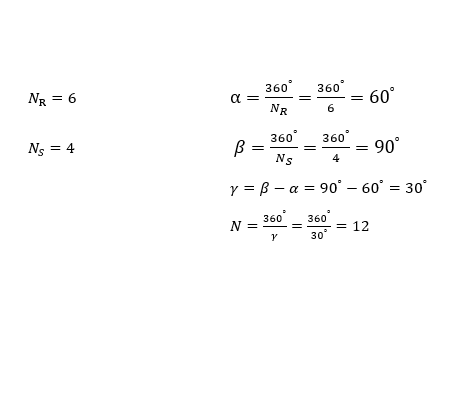
با این تفاسیر استپر موتور نشان داده شده در شکل فوق، دارای 12 گام بوده و در هر گام، روتور 30 درجه دوران می کند.
با توجه به شکل فوق، در حالتی که هیچ جریانی از سیم پیچ های استاتور عبور نمی کند، آهنربای دائم روتور باعث می شود که دو قطب از روتور روبروی دو قطب دیگر از استاتور قرار گیرد. بنابراین در این حالت محور روتور ساکن مانده و هیچ گونه حرکت اضافه ای نخواهد داشت و خط شاخص (3) در این حالت ساعت 12 را نشان می دهد.
حال با توجه به شکل فوق و حالت a شکل زیر، در صورتی که جریان از سیم 1B وارد شده و از 1A خارج شود، قطب پایین استاتور S و قطب بالایی آن N شده و با توجه به اینکه قطب S روتور روبروی قطب N استاتور و قطب N روتور روبروی قطب S استاتور قرار گرفته است، محور روتور ساکن مانده و دوران نمی کند.
با توجه به شکل فوق و حالت b شکل زیر، در گام بعدی، جریان برق از سیم 2A وارد شده و از سیم 2B خارج می شود. عبور جریان از سیم پیچ دوم استاتور باعث می شود که قطب سمت راست استاتور تبدیل به قطب S و قطب سمت چپ استاتور به قطب N تبدیل شود. از آنجایی که قطب های همنام، یکدیگر را دفع و قطب های غیر همنام یکدیگر را جذب می کنند، بنابراین قطب S استاتور، قطب S روتور را دفع و قطب N روتور را جذب می کند. به همین ترتیب قطب N استاتور، قطب N روتور را دفع و قطب S آنرا جذب می کند. این عمل باعث می شود تا روتور به اندازه دوران نموده و حالت a شکل زیر به حالت b تبدیل گردد.
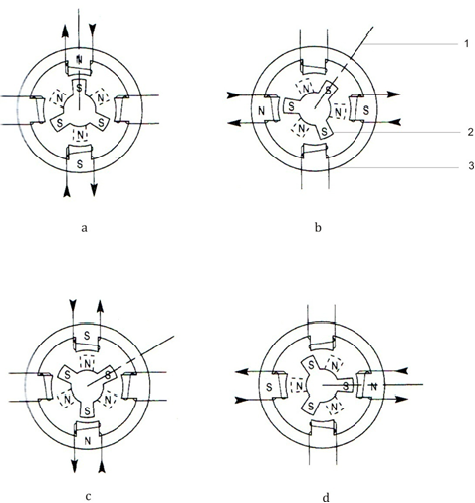
نحوه عملکرد استپر موتور با روتور 6 قطبی و استاتور 4 قطبی
حالت c شکل فوق، گام بعدی استپر موتور را نشان می دهد. در این حالت، با توجه به شکل قبل از شکل فوق، جریان برق از سیم 1A وارد شده و از سیم 1B خارج می شود و این عمل باعث می شود که قطب بالایی استاتور به قطب S تبدیل شده و قطب پایینی استاتور به قطب N تبدیل شود. بنابراین قطب S استاتور، قطب S روتور را دفع و قطب N را جذب کرده و قطب N استاتور، قطب N روتور را دفع و قطب S آنرا جذب می کند. بنابراین حالت b شکل فوق به حالت c تبدیل می شود. در این حالت نیز روتور به اندازه نسبت به حالت قبل دوران می کند.
حالت d شکل فوق، گام بعدی، استپر موتور را نشان می دهد. با توجه به شکل قبل از شکل فوق، در این وضعیت جریان برق از سیم 2B وارد شده و از سیم 2A خارج می گردد. بنابراین قطب سمت راست استاتور تبدیل به قطب N و قطب سمت چپ استاتور به قطب S تبدیل می شود. در این حالت نیز قطب N استاتور، قطب N روتور را دفع و قطب S روتور را جذب می کند. قطب S استاتور نیز قطب S روتور را دفع و قطب N روتور را جذب می کند. بدین ترتیب حالت d شکل فوق بدست می آید که در این حالت خط شاخص ساعت 3 را نشان می دهد.
با توجه به اینکه گام اول، وضعیت سکون روتور را نشان می دهد، در سه گام بعدی، روتور دوران کرده و بنابراین دوران روتور در هر استپ می باشد.
بعد از گام چهارم، دوباره گام اول تا چهارم به ترتیب انجام شده و بنابراین روتور دیگر دوران می کند. اگر گام اول تا چهارم، چهار مرتبه انجام شود، روتور یک دور کامل دوران خواهد داشت. با توجه به اینکه حالت اول وضعیت سکون روتور را نشان می دهد، برای بعدی فقط به 3 گام نیاز می باشد و با 12 گام، روتور یک دور کامل دوران می کند.
شکل زیر، مدار کنترلی استپر موتور را در حالت تمام استپ نشان می دهد.
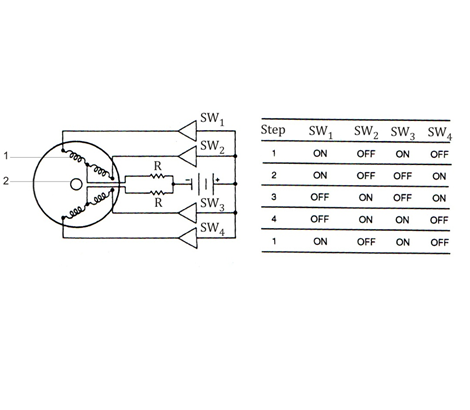
مدار کنترلی استپر موتور در حالت تمام استپ
همانگونه که ملاحظه می شود، در گام اول، واحد کنترل کلید و را روشن نموده و بقیه کلیدها خاموش است. بنابراین در این حالت جریان برق پس از عبور از کلید ، وارد سیم پیچ اول استاتور و از طریق مقاومت، به منفی باتری می رود. از طرفی با روشن بودن کلید ، جریان برق از آن عبور کرده و پس از عبور از سیم پیچ دوم استاتور، از طریق مقاومت وارد منفی باتری می شود.
در گام دوم، کلید و توسط واحد کنترل روشن شده و بقیه خاموش می شوند. در این صورت جریان برق پس از عبور از و سیم پیچ اول استاتور، از طریق مقاومت به منفی باتری می رود. جریان دیگری هم پس از عبور از به سیم پیچ اول استاتور رفته و از طریق مقاومت، وارد منفی باتری می شود.
در گام سوم کلید و توسط واحد کنترل روشن شده و بقیه خاموش می شوند. در این صورت، جریان برق عبوری از کلید وارد سیم پیچ اول استاتور شده و از طریق مقاومت به منفی باتری می رود. جریان دیگری هم از عبور کرده و پس از عبور از سیم پیچ دوم استاتور، از طریق مقاومت به منفی باتری می رود.
در گام چهارم نیز کلید و به وسیله واحد کنترل روشن شده و بقیه خاموش می شوند. بنابراین جریان برق پس از عبور از کلید و سیم پیچ اول استاتور، از طریق مقاومت به منفی باتری می رود. در حالی که جریان دیگری هم پس از عبور از کلید و سیم پیچ دوم استاتور از طریق مقاومت وارد منفی باتری می شود.
بعد از اتمام گام چهارم، دوباره گام های قبلی تکرار می شود و این روند تا زمانی که تمامی کلیدها در وضعیت خاموش قرار گرفته و روتور استپر موتور به حالت سکون برسد، ادامه خواهد داشت.
مدار کنترلی استپر موتور را درحالت نیم استپ نشان می دهد.
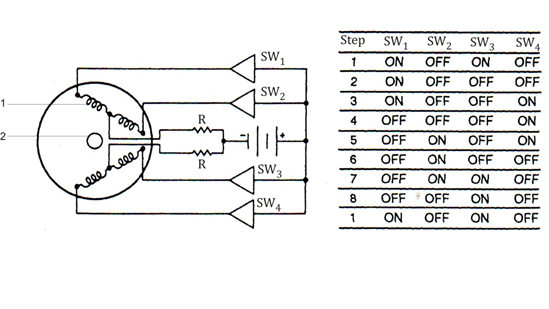
1: سیم پیچ های استاتور 2: روتور
مدار کنترلی استپرموتور در حالت نیم استپ
در حالت تمام استپ و نیم استپ، روتور به صورت ناگهانی از یک گام به گام دیگر حرکت می کند و مقدار گام ها بستگی به تعداد قطب های روتور و استاتور دارد. برای یکنواخت کردن حرکت روتور و افزایش تعداد گام ها می توان از روش میکرواستپ استفاده نمود. در این حالت، واحد کنترل باید فوق العاده توانمند باشد و توسط سیگنال هایی که به سیم پیچ ها ارسال می کند، زوایای بسیار دقیقی ایجاد می شود.
استپر موتور مورد استفاده در موتور خودرو
در عمل و به خصوص در خودرو، معمولاً از استپر موتورهایی استفاده می شود که روتور آنها دارای 50 قطب و استاتور آنها دارای 40 قطب می باشد. بنابراین تعداد گام ها و زاویه دوران روتور در هر گام به صورت زیر قابل محاسبه می باشد.
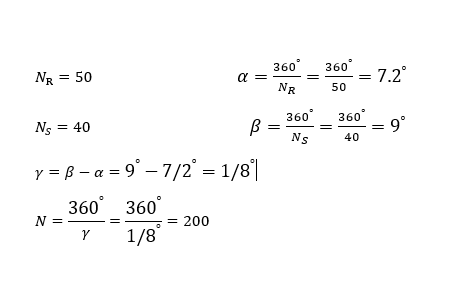
بنابراین، این استپر موتور در حالت تمام استپ، دارای 200 گام می باشد که در هر گام، محور روتور به اندازه ر دوران می کند. این استپر موتور در حالت نیم استپ نیز دارای 400 گام می باشد و در هر گام محور روتور به اندازه ر می چرخد. امروزه استپ 000,100 گام برای هر دور گردش روتور ایجاد می شود. بنابراین در این حالت، روتور در هر گام فقط به اندازه دوران می کند.
با توجه آنچه گفته شد، از استپر موتور برای ایجاد دوران و تغییر مکان های نسبتاً دقیق و بسیار دقیق می توان استفاده نمود. تنها عیب استپر موتور عدم تولید گشتاور بالا می باشد.
لازم به ذکر است که در خودرو معمولاً از حالت تمام استپ استپر موتور استفاده می شود.
شکل زیر، استفاده از استپر موتور برای کنترل دور آرام خودرو را نشان می دهد.
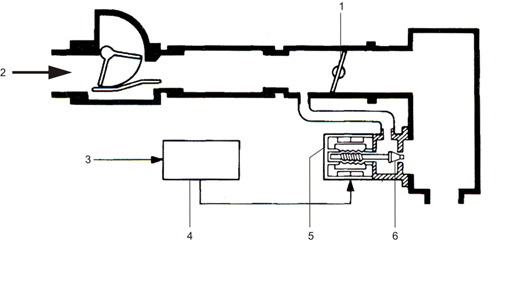
1: دریچه گاز 2: هوای ورودی به موتور 3: اطلاعات سنسورها به واحد کنترل
4: واحد کنترل 5: استپر موتور کنترل دور آرام 6: سوپاپ مخروطی
استفاده از استپر موتور برای کنترل دور آرام موتور
معمولاً استپر موتوری که برای کنترل دور آرام استفاده می شود، دارای 200 گام می باشد. بنابراین به ازای هر گام، روتور دوران می کند. شایان توجه است که در برخی خودروها از نوع 125 استپی استفاده شده است.
در انتهای شفت، سوپاپ مخروطی (6) درون روتور، پیچ شده است. بدین ترتیب با دوران روتور، شفت و سوپاپ مخروطی حرکت خطی انجام می دهند.
با دوران روتور به ازای هر گام، سوپاپ مخروطی به اندازه 04/0 میلی متر به سمت راست یا چپ حرکت می کند. این عمل باعث می شود که هوای عبوری از مسیر کنار گذر، کاهش یا افزایش یابد. بدین ترتیب بدون حرکت دریچه گاز، با تغییر نرخ هوای ورودی به موتور در وضعیت های مختلف کارکرد (مانند استفاده از کولر، فرمان هیدرولیک، تجهیزات الکتریکی، جعبه دنده اتوماتیک، سرد بودن موتور و غیره)، دور آرام موتور کنترل می شود.
کنترل الکترونیکی استپر موتور دور آرام، در موتور خودرو مطابق شکل زیر می باشد.
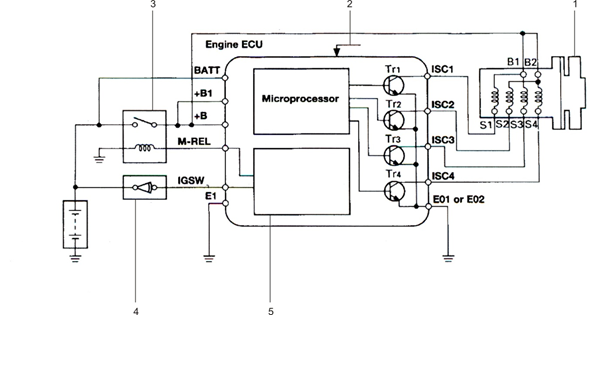
1: استپر موتور کنترل دور آرام 2: اطلاعات سنسورها به واحد کنترل 3: رله اصلی سیستم انژکتور
4: سوئیچ جرقه 5: مدار کنترلی رله اصلی سیستم انژکتور ISC : کنترل دور آرام
کنترل الکترونیکی استپر موتور دور آرام در موتور خودرو
با توجه به شکل فوق، چنانچه ترانزیستورها به ترتیب ، روشن شوند، مسیر کنار گذر بسته تر شده و حجم هوای ورودی موتور از مسیر کنار گذر کاهش می یابد. همچنین اگر روشن شدن ترانزیستورها به شکل TR1،TR2،TR3،TR4باشد، مسیر کنار گذر بازتر شده و حجم هوای عبوری از مسیر کنار گذر افزایش می یابد. توسط مقدار باز یا بسته شدن مجرای کنار گذر، دور آرام موتور کنترل می شود.
استپر موتور دارای 2 قسمت اصلی الکتریکی و مکانیکی می باشد. برای تست قسمت الکتریکی، مقاومت سیم پیچ های استپر موتور بررسی می شود. مقاومت سیم پیچ استپر موتور در حدود Ω 50 تا Ω 55 می باشد که این مقدار در هر دو سیم پیچ باید با هم برابر باشد. از لحاظ مکانیکی نیز باید پلانجر استپر موتور بررسی شود. به طوری که پلانجر نباید بچرخد و تنها حرکت طولی داشته باشد. در ضمن باید توجه داشت در حالی که استپر موتور از جای خود خارج شده است، نباید سوئیچ جرقه روشن شود چرا که این عمل منجر به خارج شدن پلانجر استپر موتور می شود.
























سلام برق استپر سمند پنج ولته چرا؟؟؟ چراغ چک هم بابت استپر روشنه
سلام برق استپر موتور توسط ایسیو به صورت لحظه ای جابجا میشه و اندازه گیری ولتاژش خیلی معمول نیست باید مقاومت، نیرو و جابجایی استپر موتور رو اندازه گیری کنید که در فیلم به صورت مفصل توضیح داده شده. لذا کارکرد استپر موتور رو بررسی کنید.
سپاس از مطلب مفیدتون
استاد تنها عملگری که از ایسیو برق 12 ولت میگیره استپر موتور هست؟
سلام به البته دریچه گاز برقی هم به صورت PWM کنترل میشه.
سلام . یک سمند سورن ef7 ۹۹ دارم . در هر روز بار اولی که روشن میکنم در حالت درجا(بدون محدودیت زمانی) بدون هیچ مشکلی یا هرگونه نوسانی در دور موتور، ماشین کار میکنه.
ولی بعنوان مثال وقتی ۲۰ دقیقه رانندکی کنم و مجبور بشم جایی توقف کنم ( پشت چراغ قرمز بالای ۲ دقیقه ترافیک یا ، توقف موتور روشن در حالت درجا) موتور به یکباره خاموش میشه ، چراغ چک روشن ولی سریعا و بدون مشکل با تک استارت روشن میشه !!!
۱-دیاگ زدم ایرادی مشاهده نشد
۲- ۲ بار استپر عوض کردم
۳-اتصالات برق بررسی و مشکل نداشت
ولی مشکل به قوت خودش باقیست؟
نظرتون چیه ؟
سلام فشار و دبی پمپ بنزین رو بررسی کنید، خاموش شدن آنی میتونه از داغ شدن و عدم عملکرد پمپ بنزین باشه. بخصوص الان که هوا در حال گرم شدن هست بیشتر عیوب خاموش شدن متوجه عدم عملکرد مناسب پمپ بنزین هست. ضمن اینکه رله پمپ بنزین هم میتونه همین عیب رو ایجاد کنه.
جناب نصیری سلام مجدد . تو بازه زمانی یک سری قطعات رومجدد تعویض کردیم ولی باز به نتیجه نرسیدیم ، خواستم مجدد نظر شما رو بدونم .
موارد تعویض شده
کوئل
شمع
شستشوی انژکتور
تعویض کامل پمپ بنزین
سنسور مپ
سنسور موقعیت میل لنگ
سخت افزار کامپیوتر ecu نمونه دقیق و مشابه کامل
ولی همچنان در حالت idle خاموش می شود .
سلام وقتی خاموش میشه وضعیت استپرموتور رو بررسی کنید که در چه موقعیتی قرار گرفته و کارکرد مکانیکی و برقی استپر موتور رو بررسی کنید میتونید این مقاله رو مطالعه کنید و فیلم های اون را ببینید:
https://www.ameg.ir/%D8%A7%D8%B3%D8%AA%D9%BE%D8%B1-%D9%85%D9%88%D8%AA%D9%88%D8%B1-%D8%AF%D8%B1%DB%8C%DA%86%D9%87-%DA%AF%D8%A7%D8%B2/