
مکانیک خودرو تخصصی -بخش 18
مجموعه قطعاتي كه قدرت را از موتور دريافت كرده و به چرخها تحويل ميدهند را مجموعة انتقال قدرت گويند که به طور کلی به سه گروه به شرح زیر تقسیم میشوند.
• طرح عقب محرک یا استاندارد:
چنانچه قدرت موتور مطابق شكل 1 به چرخهاي عقب منتقل شود، مجموعه را عقب محرك يا RWD (Rear Wheel Drive)، RD(Rear Drive) یا استاندارد مينامند.
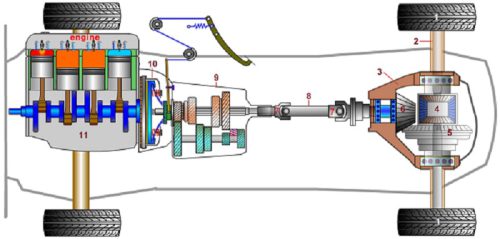 1-تاير عقب 2-پلوس 3-اكسل يا پوسته ديفرانسيل 4-ديفرانسيل يا هوزينگ ديفرانسيل 5-كرانويل 6-پينیون 7-چهار شاخه كاردان 8-ميل كاردان 9-گيربكس يا جعبه دنده 10-كلاچ 11-موتور
1-تاير عقب 2-پلوس 3-اكسل يا پوسته ديفرانسيل 4-ديفرانسيل يا هوزينگ ديفرانسيل 5-كرانويل 6-پينیون 7-چهار شاخه كاردان 8-ميل كاردان 9-گيربكس يا جعبه دنده 10-كلاچ 11-موتور
شكل1-شماتيك خودرو عقب محرك، استاندارد يا RD
مزایای این طرح به شرح زیر است:
- به دلیل توزيع وزن یکنواختتر روی چرخهای عقب و جلو استاندارد نامیده میشود که باعث پایداری بیشتر خودرو میشود.
- هنگام شتابگیری مثبت، مقداری بار عمودی از چرخ هاي جلو کاسته شده و به چرخ هاي عقب اضافه میشود، لذا نیروی اصطکاک بین چرخهای عقب و زمین زیاد شده و لغزش بین چرخ و زمین کاهش مییابد که باعث میشود توان کمتری هدر رفته و بیشتر توان موتور صرف شتابگیری خودرو شود و لذا این طرح، داراي قابلیت ایجاد شتابگيري بالاتر، نسبت به خودروهاي جلو محرك است.
معایب عمده این نوع چیدمان اجزای خط انتقال قدرت به شرح زیر است:
- گران بودن به دلیل افزایش تعداد قطعات
- وجود میلگاردان که باعث تولید ارتعاش میشود و طرح نیز گران میشود.
- گیربکس دارای سه محور ورودی، زیر و خروجی است و بنابراین گیربکس این طرح نیز گرانتر است.
- برای تغییر 90 درجهای صفحه دوران میلگاردان به صفحه دوران چرخها، باید پینیون و کرانویل مخروطی استفاده کرد که این موضوع باعث میشود هزینههای مرتبط با طراحی، ساخت و تنظیم دیفرانسیل در طرح RD افزایش یابد.
• طرح جلو محرک:
در خودروهاي سواري امروزي به منظور استفاده از استراتژی ارزانسازی، مطابق شکل 2 عمدتا از چیدمان جلو محرك يا (Front Drive)FD یا FWD(Front Wheel Drive) استفاده میشود.
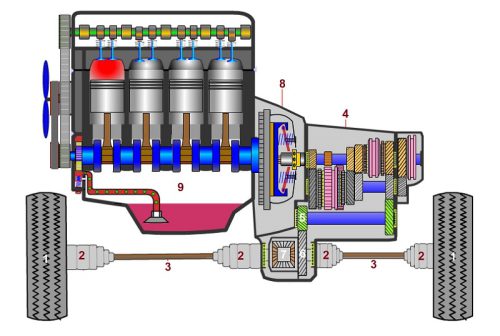 1-تاير جلو 2-مفاصل سرعت ثابت(Constant Velocity joint) 3-پلوس 4-گيربكس يا جعبه دنده 5-پينیون 6-كرانويل 7-ديفرانسيل يا هوزينگ ديفرانسيل 8-كلاچ 9-موتور
1-تاير جلو 2-مفاصل سرعت ثابت(Constant Velocity joint) 3-پلوس 4-گيربكس يا جعبه دنده 5-پينیون 6-كرانويل 7-ديفرانسيل يا هوزينگ ديفرانسيل 8-كلاچ 9-موتور
شكل 2-شماتيك خودرو جلو محرك يا FD
مزایای این طرح به شرح زیر است:
- مسير انتقال قدرت به دليل حذف ميل كاردان كوتاهتر میشود و ضمن کاهش ارتعاشات ناشی از دوران میلگاردان، هزينة تمام شدة اين نوع طرح نیز كاهش مييابد.
- به دلیل یکسان بودن صفحه دوران میللنگ با صفحه دوران چرخها، پينیون و كرانويل، ديفرانسيل نيز از نوع چرخدندههای معمولی است که هزینه طراحی، ساخت و تنظیم را کاهش میدهد.
- گیربکس این طرح دارای دو محور ورودی(اولیه) و خروجی(ثانویه) است که در مقایسه با گیربکس طرح RD که دارای سه محور است، ارزانتر است.
- مطابق شکل 3 با اعمال نیروی محرک(FX) به چرخهای جلو، نیروی اینرسی خودرو(m*a) در مرکز ثقل خودرو به عنوان عکسالعمل نیروی محرک تولید میشود. بنابراین نیروی محرک چرخها در حرکت رو به جلو، جلوتر از نیروی اینرسی خودور قرار میگیرد به نحوی که نیروی محرک چرخها، نیروی اینرسی را به دنبال خود میکشد. از طرفی جهت نیروی محرک چرخها تابع جهت حرکت چرخهای جلو است و جهت حرکت چرخهای جلو نیز توسط راننده از طریق سیستم فرمان کنترل میشود بنابراین در صورت انحراف جانبی نیروی اینرسی خودرو(مانند باد جانبی که به خودرو اعمال میشود)، نیروی محرک چرخهای جلو که توسط فرمان و بوسیلة راننده کنترل میشود، نیروی اینرسی خودرو را با خود همجهت کرده و به دنبال خود میکشد که باعث پايداري جهتي مطلوبتر خودرو نسبت به طرح RD ميشود در حالیکه در خودروهای RD، اعمال نیروی محرک به چرخهای عقب باعث هل دادن نیروی اینرسی میشود که در صورت انحراف جانبی مرکز تقل خودرو، نیروهای محرک به افزایش انحراف و ناپایداری کمک میکنند و خودرو را ناپایدار میکنند.
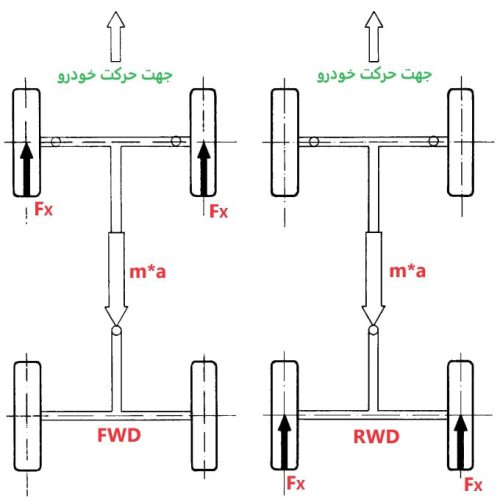 شکل 3-تفاوت خودروهای RD و FD در قابلیت فرمانپذیری
شکل 3-تفاوت خودروهای RD و FD در قابلیت فرمانپذیری
- هنگام حرکت خودرو در سربالایی، نیروی وزن روی چرخهای جلو کاهش مییابد و این موضوع باعث کاهش نیروی اصطکاک بین چرخهای جلو و زمین میشود. با کاهش نیرو اصطکاک بین تایر و زمین، مقدار لغزش بین چرخهای جلوی و زمین افزایش مییابد و باعث میشود که همانند نیم کلاچ کردن، دور موتور افزایش یابد و بتوان از سطوح بالاتر گشتاور تولید موتور استفاده کرد و در این حالت راننده احساس مطلوبتری نسبت به شتابگیری این نوع خودروها در شیب جاده دارد و احساس میکند که شتابگیری این خودروهای بهتر از خودروهای با طرح استاندارد است در حالیکه قابلیت شتاب طرح FD از RD کمتر است.
معایب طرح FD به شرح زیر است:
- توزیع بار روی چرخهای عقب و جلو، بخصوص در خودروهای بدون صندوق عقب، نامتوازن است و باعث ناپایداری خودرو بخصوص در شرایط فرماندهی و ترمزگیری همزمان میشود.
- هنگام شتابگیری مثبت، مقداری از بار عمودی به چرخهای جلو کاهش یافته و به چرخهای عقب منتقل میشود. لذا با کاهش نیروی عمودی روی چرخهای جلو، نیروی اصطکاک بین چرخهای جلو و زمین کاهش یافته و مقداری از توان موتور به صورت لغزش بین چرخهای جلو و زمین از بین میرود و بنابراین نسبت به طرح RD، داراي قابلیت ایجاد شتابگيري كمتري است.
• طرح چهار چرخ محرک:
طرح ديگري نيز مطابق شكل 4 وجود دارد كه در آن قدرت موتور به چرخهاي جلو و عقب به طور همزمان منتقل ميشود كه به آن چهار چرخ محرك يا 4WD(Four Wheel Drive) يا (All Wheel Drive)AWD گفته ميشود و مزاياي خودروهاي FD و RD را دارد ولي هزينه و وزن آن زيادتر ميشود. اين طرح بيشتر در خودروهاي چند منظوره SUV(Several Utility Vehicle) یا Off Road استفاده ميشود. در این طرح قدرت موتور وارد گیربکس خودرو میشود و پس از آن وارد گیربکس کمک(Transfer Case) میگردد. قدرت خروجی از جعبه دنده کمک به دیفرانسیل عقب و جلو منتقل میشود
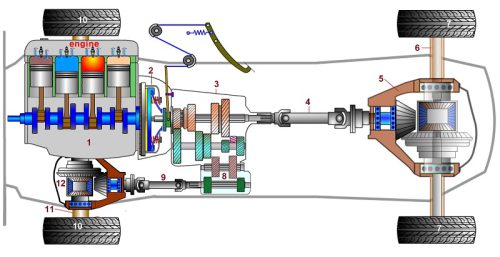 1- موتور 2-کلاچ 3-جعبه دنده 4-ميلكاردان عقب 5-ديفرانسيل عقب 6-پلوسهاي عقب 7-چرخهای عقب 8-جعبهدنده کمک 9-میلکاردان جلو 10-چرخهای جلو 11-پلوسهاي جلو 12-ديفرانسيل جلو
1- موتور 2-کلاچ 3-جعبه دنده 4-ميلكاردان عقب 5-ديفرانسيل عقب 6-پلوسهاي عقب 7-چرخهای عقب 8-جعبهدنده کمک 9-میلکاردان جلو 10-چرخهای جلو 11-پلوسهاي جلو 12-ديفرانسيل جلو
شكل 4-شماتيك چیدمان سیستم انتقال قدرت چهارچرخ محرك يا 4WD
 شکل 5-دسته دندههای تعویض دنده گیربکس اصلی و گیربکس کمک
شکل 5-دسته دندههای تعویض دنده گیربکس اصلی و گیربکس کمک
در برخی خودروها، دسته دنده جعبه دنده کمک حذف شده و مطابق شکل 6 به جای آن سلکتوری نصب میشود که میتوان حالتهای مختلف جعبهدنده کمک را ایجاد کرد.
 شکل 6-سلکتور وضعیتهای مختلف جعبهدنده کمک
شکل 6-سلکتور وضعیتهای مختلف جعبهدنده کمک
تشریح عبارات درج شده بر روی دسته دنده یا سلکتور جعبهدنده کمک به شرح زیر است:
• H2 یا 2H:
منظور از عدد 2، دو چرخ است. با انتخاب این حالت، قدرت موتور فقط به دو چرخ جلو یا دو چرخ عقب منتقل میشود و حرف H به معنی High Speed است که قابلیت استفاده از سرعتهای بالا در این وضعیت وجود دارد و کاربرد این شرایط در آب و هوای خشک و جادههای معمولی است.
• H4 یا 4H:
منظور از عدد 4، چهار چرخ است. با انتخاب این حالت، قدرت موتور به چهار چرخ خودرو منتقل میشود و حرف H به معنی High Speed است که قابلیت استفاده از سرعتهای بالا در این وضعیت وجود دارد و کاربرد این شرایط در آب و هوای مرطوب یا جادههای با شیب و پیچ و خم اندک است.
• L4 یا 4L:
منظور از عدد 4، چهار چرخ است. با انتخاب این حالت، قدرت موتور به چهار چرخ خودرو منتقل میشود و حرف L به معنی Low Speed است که در این حالت سرعت خودرو از حد مشخصی افزایش نمییابد. از این حالت در شرایط شدید لغزنده همانند یخبندان، جادههای پوشیده از برف، گل و لای و شنزار، جادههای کوهستانی با شیب تند و غیره استفاده میشود.
• N:
این حرف ابتدای کلمه Neutral به معنی خلاص است. با انتخاب این گزینه، جعبهدنده کمک در وضعیت خلاص قرار میگیرد به نحوی که با روشن شدن موتور و در دنده قرار گرفتن گیربکس، قدرت وارد جعبهدنده کمک میشود ولی قدرتی از آن خارج نمیشود. این حالت معمولا مخصوص استفاده از وینچ است. در برخی خودروهای Off Road، وینچی بر روی سپر جلوی خودرو نصب میشود که با استفاده از سیم بکسل این وینچ هم میتوان بارهایی را از موقعیتهای پست مانند داخل دره یا داخل چاه بیرون کشید و همچنین اگر خودرو در گل و لای گیر کند میتوان سیم بکسل وینچ را به درخت یا صخرهای متصل کرد تا با جمع کردن سیمبکسل توسط وینچ، خودرو از موقعیت اضطرار خارج شود.
• 4H Auto:
با انتخاب این گزینه، خودرو در سرعتهای پایین و شرایط لغزنده از وضعیت چهار چرخ محرک بهرهمند میشود و در شرایط سرعت بالا و بدون لغزش در وضعیت دو چرخ محرک قرار میگیرد تا از افزایش مصرف سوخت، آلایندگی و استهلاک قطعات پیشگیری شود.
• 4H Part Time:
با انتخاب این گزینه، خودرو به صورت لحظهای در وضعیت چهارچرخ محرک قرار میگیرد و پس از عبور از شرایط لغزنده یا اضطرار به وضعیت دو چرخ محرک تبدیل میشود.
 شکل 7-درج عبارات 4WD و AWD در پشت برخی خودروها
شکل 7-درج عبارات 4WD و AWD در پشت برخی خودروها
4WD:
این عبارت به معنی Four Wheel Drive یا چهار چرخ محرک است و در این نوع خودروها راننده قادر به انتخاب شرایط حرکتی از قبیل 2H، 4H، 4L و غیره است. بنابراین راننده شرایط جوی، وضعیت جاده، سرعت خودرو و بار روی خودرو رو برآورد میکند و متناسب با آن از شرایط مختلف جعبه دنده کمک بهرهبرداری میکند.
AWD:
این عبارت به معنی All Wheel Drive یا همه چرخها محرک یا Automatic Wheel Drive یا محرک کردن اتوماتیک چرخها است. بدین معنا که در این نوع خودروها معمولا راننده قادر به انتخاب شرایط مختلف حرکت خودرو نیست بلکه واحد کنترل الکترونیکی گیربکس یا TCU(Transmission Control Unit) با توجه به سرعت خودرو، میزان لغزش طولی چرخها، زاویه غربیلک فرمان و غیره شرایط حرکتی متناسب با شرایط خودرو و جاده را انتخاب میکند و به طور کلی معمولا تا سرعت 40 کیلومتر بر ساعت به صورت 4WD است و پس از این سرعت به حالت 2WD تبدیل میشود.
اشتراک در
0 نظرات





