
روش انتقال پیام در پروتکل CAN چیست؟ چگونه یونیتها تشخیص میدهند کدام پیام را روی خط شبکه ارسال کنند؟ کدام پیام اولویت دارد؟ آیا یونیت فرستنده از دریافت پیام مطلع میشود؟ در ادامه سلسله مطالب مرتبط به شبکه و کاربرد آن در خودرو، در این مقاله در مورد مفاهیم مرتبط با پروتکل CAN مطالبی بیان خواهد شد. این یک مقاله علمی، تخصصی است و برای دانشجویان و فارق التحصیلان کاردانی و کارشناسی مکانیک خودرو، گروه مکاترونیک و الکترونیک قابلاستفاده است بعلاوه کسانی که در یک سطح بالاتر از تعمیرات و در حوزه تیونیگ کردن و اضافهکردن تجهیزات الکترونیکی به خودرو فعال هستند نیز میتواند مفید باشد. برای بهرهمندی بهتر، پیشنهاد میشود مقالههای قبلی مرتبط با شبکه و پروتکل CAN را مطالعه کنید.
مفاهیم اولیه ارتباط نودها
باتوجهبه گسترده و پیچیده بودن مطالب تاحدامکان سعی خواهد شد بهصورت مرحلهبهمرحله مفاهیم تشریح شود تا مطالب با سهولت بیشتری دریافت شوند. به همین دلیل ارتباط بین 3 یونیت مورد بررسی قرار خواهد گرفت. شکل 1 نمای کلی اجرای ارتباط شبکه را نشان میدهد.
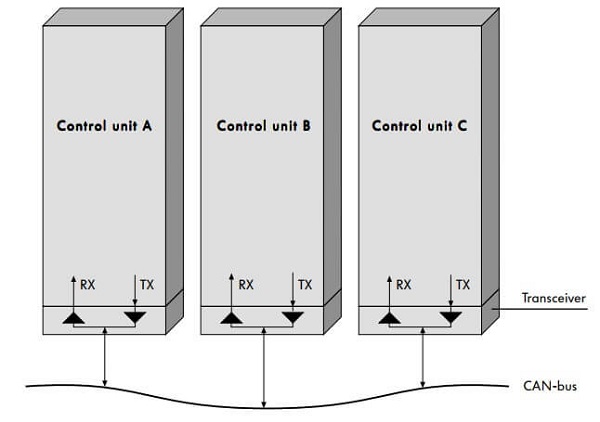 شکل 1- ارتباط سه کنترل یونیت از طریق خط شبکه CAN-Bus
شکل 1- ارتباط سه کنترل یونیت از طریق خط شبکه CAN-Bus
همانطور که در این شکل نشاندادهشده است آخرین لایه در هر کنترل یونیت، به نام Transceiver (ترکیبی از دوکلمه Transfer و Reciver) است که عبارت واحد فرستنده/گیرنده ترجمه مناسبی برای آن خواهد بود. این لایه فیزیکی در هر یونیت وجود دارد و از طریق خط شبکه CAN-Bus با سایر یونیتها (یا همان نودها) در ارتباط است. اگر توجه کنید در لایه Transceiver دو خط با نامهای TX و RX وجود دارد در واقع خط TX همان خط ارسال پیام و خط RX خط دریافت پیام است. اولین نکته که در شکل 1 قابلمشاهده است، این است که پیامهای ارسالی و پیامهای دریافتی از طریق خط شبکه can-bus انتقال پیدا میکنند.
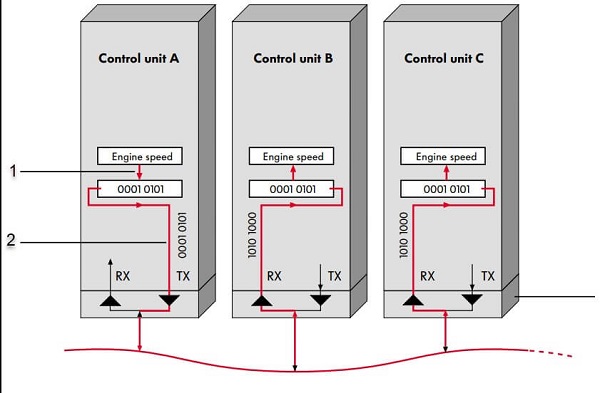 1-تبدیل پیام به کد باینری CAN 2- تبدیل کد به ولتاژ
1-تبدیل پیام به کد باینری CAN 2- تبدیل کد به ولتاژ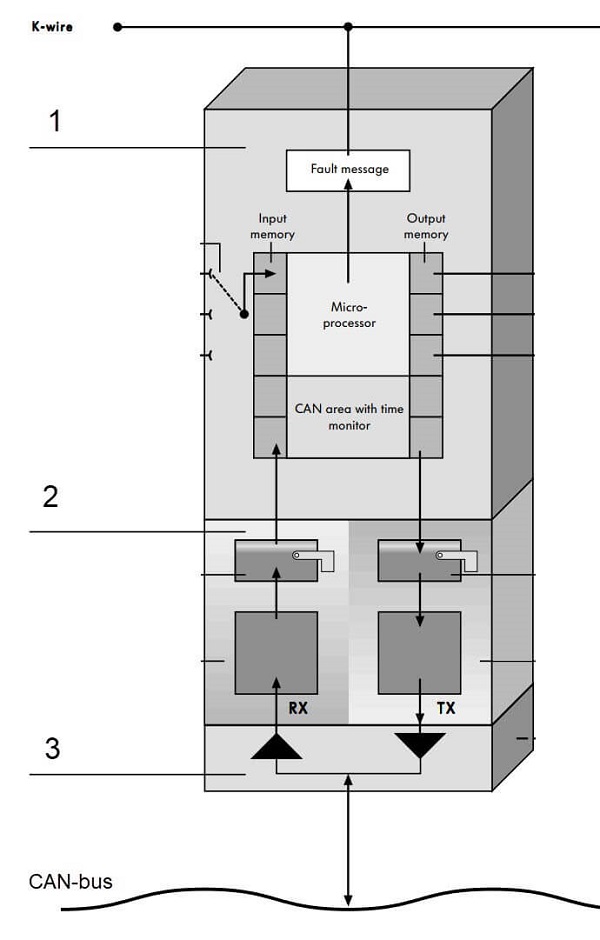 1- کنترل یونیت 2- ماژول (CAN) 3- واحد فرستنده/گیرنده
1- کنترل یونیت 2- ماژول (CAN) 3- واحد فرستنده/گیرنده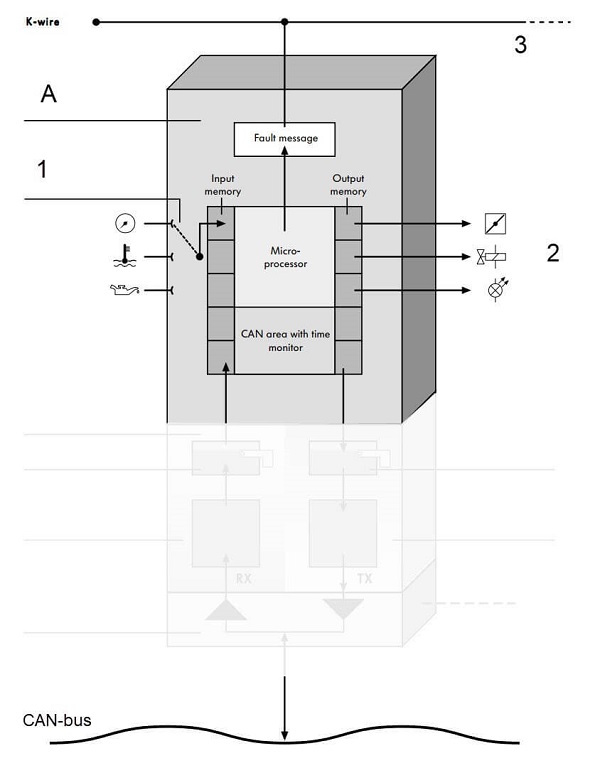 A- کنترل یونیت 1
A- کنترل یونیت 1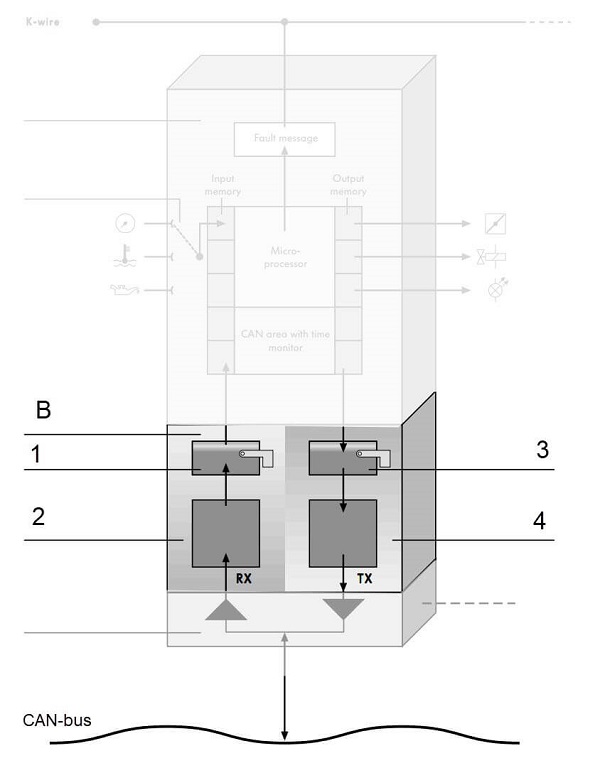 B- ماژول CAN
B- ماژول CAN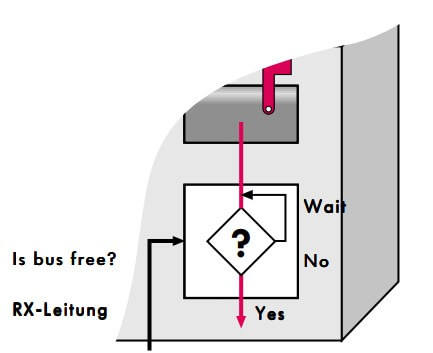 شکل 6- بررسی آزاد بودن خط شبکه
شکل 6- بررسی آزاد بودن خط شبکه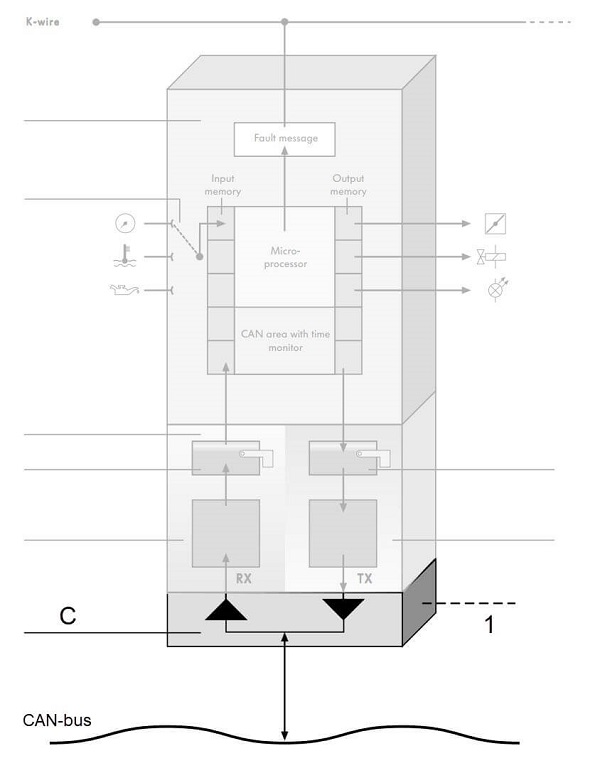 C-واحد
C-واحد 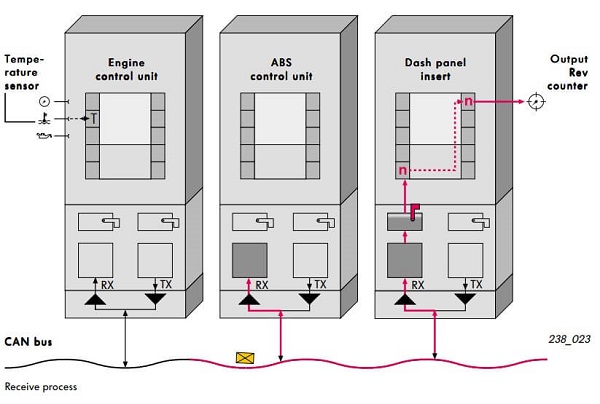 شکل 8- انتقال پیام در خط شبکه
شکل 8- انتقال پیام در خط شبکه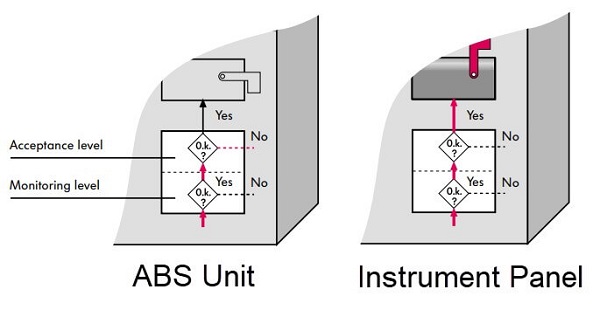 شکل 9- بررسی پیام در واحد فرستنده/گیرنده
شکل 9- بررسی پیام در واحد فرستنده/گیرنده




