
سيستم فرمان
برای كنترل جهت حركت خودرو و حرکت پایدار و بدون لغزش خودرو در پیچ جاده از سيستم فرمان استفاده ميشود. برای آنکه خودرو بتواند در مسیر پیچ جاده بدون لغزش جانبی و به صورت پایدار حرکت کند، مطابق شکل 1 چرخ داخل پیچ باید بیش از چرخ خارج پیچ، زاویه فرمان داشته باشد. همانگونه که قابل ملاحظه است، به طور مثال زاویه فرمان چرخ داخل پیچ 20 درجه و زاویه فرمان چرخ بیرون پیچ 18 درجه است.
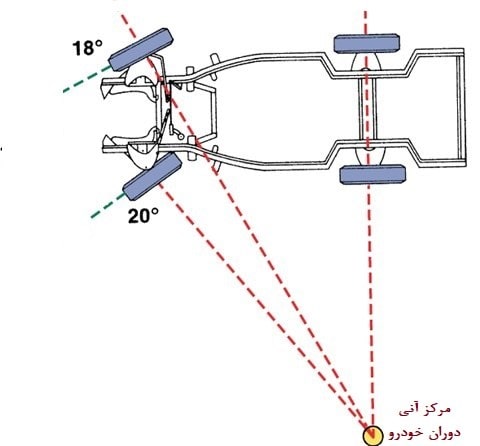 شکل 1-نحوه دوران خودرو در مسیر پیچ جاده
شکل 1-نحوه دوران خودرو در مسیر پیچ جاده
بدین منظور مطابق شکل 2 اگر اجزای مکانیزم فرمان، شامل شغالدستهای چپ و راست، میلفرمان و شاسی خودرو، تشکیل شکل هندسی مستطیل بدهند، در هر حالت زاویه فرمان چرخ چپ با زاویه فرمان چرخ راست برابر خواهد بود، بدین منظور مطابق شکل، از اتصال قطعات ذکر شده باید ذوزنقهای تشکیل شود که به ذوزنقه فرمان معروف است. میزان زاویه انحراف شغالدست نسبت به خط طولی خودرو باید به اندازهای باشد که امتداد شغالدستهای چپ و راست بر روی مرکز اکسل عقب قرار گیرد.
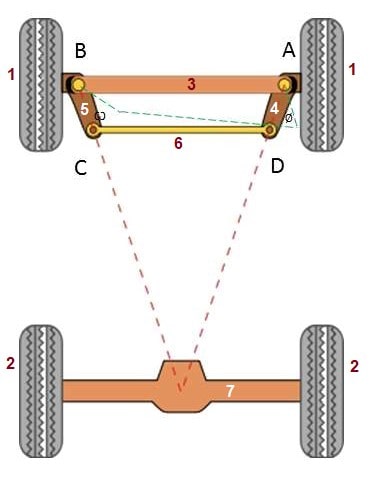 1-چرخهای جلو 2-چرخهای عقب 3-شاسی یا بدنه خودرو 4-شغالدست راست 5-شغالدست چپ 6-میلفرمان 7-اکسل عقب
1-چرخهای جلو 2-چرخهای عقب 3-شاسی یا بدنه خودرو 4-شغالدست راست 5-شغالدست چپ 6-میلفرمان 7-اکسل عقب
شکل 2-ذوزنقه فرمان
با تشکیل ذوزنقه فرمان، مطابق شکل 3 زاویه چرخ داخل پیچ بیشتر از زاویه چرخ بیرون پیچ میشود و حرکت خودرو بدون لغزش در پیچ جاده تضمین میشود.
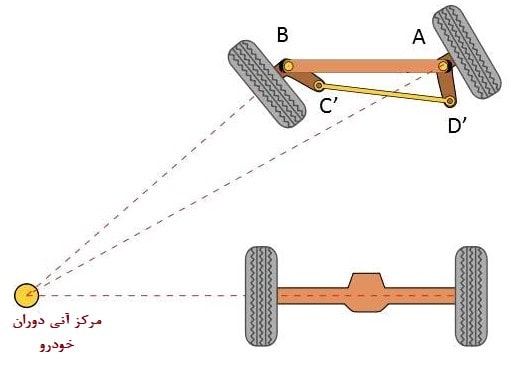 شکل 3-عملکرد ذوزنقه فرمان در ایجاد اختلاف زاویه فرمان بین چرخ داخل و بیرون پیچ
شکل 3-عملکرد ذوزنقه فرمان در ایجاد اختلاف زاویه فرمان بین چرخ داخل و بیرون پیچ
مکانیزم انتقال قدرت سیستم فرمان:
ضریب تبدیل بین دست راننده تا چرخهای جلو در سیستم فرمان 20 است یعنی نیروی دست راننده که به چرخهای جلو میرسد 20 برابر و جابجایی یک بیستم میشود. برای انتقال قدرت از دست راننده و غربیلک فرمان به چرخهای خودرو از چهار روش زیر استفاده میشود:
سیستم فرمان مکانیکی یا دستی
شکل 4 انتقال قدرت مکانیکی یا دستی در سیستم فرمان را نشان میدهد. همانگونه که ملاحظه میشود، نیروی دست راننده از طریق غربیلک فرمان به ستون فرمان و از آنجا به جعبهفرمان منتقل میشود. سپس، قدرت از طریق مکانیزم میلهای ذوزنقه فرمان به شغالدست و سگدست منتقل شده و باعث دوران چرخ میشود.
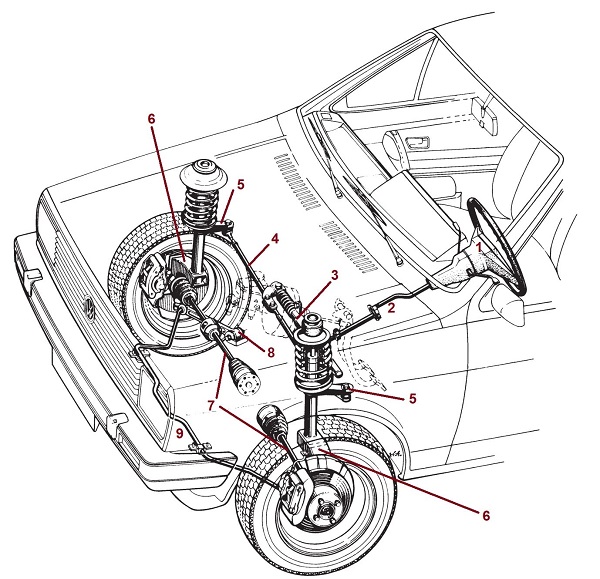 1-غربیلک فرمان 2-ستون فرمان 3-جعبه فرمان 4-میلفرمان 5-شغالدست 6-سگدست 7-پلوس 8-طبق 9-میله ضد غلتش یا میل موجگیر
1-غربیلک فرمان 2-ستون فرمان 3-جعبه فرمان 4-میلفرمان 5-شغالدست 6-سگدست 7-پلوس 8-طبق 9-میله ضد غلتش یا میل موجگیر
شکل 4-سیستم فرمان با انتقال قدرت مکانیکی
در اين حالت نيروي دست راننده از طريق غربيلك فرمان، جعبه فرمان و مكانيزم فرمان افزايش يافته و مقدار افزايش آن با توجه به نوع خودرو بين 15 تا 30 برابر بوده و به چرخها منتقل ميشود در اين صورت جابجايي چرخ ها نيز نسبت به جابجايي دست راننده 1/30 تا 1/15 ميشود. در اين نوع از سیستم انتقال قدرت، هيچ نيرويي به دست راننده كمك نميكند و بنابراین چرخاندن غربیلک فرمان به نیروی قابل ملاحظهای نیاز دارد ضمن اینکه به دلیل سفت بودن فرمان، تاخیر در فرماندهی نیز ایجاد میشود و بنابراین قابلیت مانوردهی خودرو هنگام پارک کردن یا حین حرکت کاهش مییابد. برای از بین بردن این عیب از سیستمهای کمکی فرمان هیدرولیکی، الکتروهیدرولیکی و برقی استفاده میشود که در ادامه به بررسی آنها پرداخته میشود.
سیستم فرمان هیدرولیکی(HPS )
در اين حالت با توجه به شكل 5 اجزاء زير به سيستم فرمان دستی اضافه میشود:
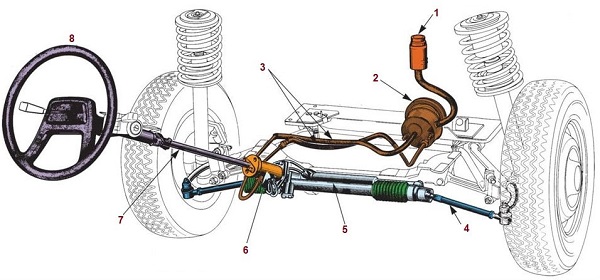 1- مخزن روغن هيدروليك فرمان 2- پمپ هيدروليك فرمان 3-لولههاي هيدروليك پرفشار و کم فشار فرمان 4-میل فرمان 5-جعبهفرمان هیدرلیکی 6-مجموعه شیر فرمان هیدرولیک 7-ستون فرمان 8-غربیلک فرمان
1- مخزن روغن هيدروليك فرمان 2- پمپ هيدروليك فرمان 3-لولههاي هيدروليك پرفشار و کم فشار فرمان 4-میل فرمان 5-جعبهفرمان هیدرلیکی 6-مجموعه شیر فرمان هیدرولیک 7-ستون فرمان 8-غربیلک فرمان 1-سیبک فرمان 2-میلفرمان 3-گردگیر 4-لولههای هیدرولیک فرمان 5-جعبه فرمان 6-شیر هیدرولیک فرمان
1-سیبک فرمان 2-میلفرمان 3-گردگیر 4-لولههای هیدرولیک فرمان 5-جعبه فرمان 6-شیر هیدرولیک فرمان 1-درب مخزن روغن 2-مخزن روغن هیدرولیک فرمان 3-پولی 4-پمپ هیدرولیک فرمان
1-درب مخزن روغن 2-مخزن روغن هیدرولیک فرمان 3-پولی 4-پمپ هیدرولیک فرمان 1-غربیلک فرمان 2-ستون فرمان 3-سیبک فرمان 4-مخزن روغن هیدرولیک فرمان 5-پمپ و موتور 6-میلفرمان 7-گردگیر 8-شیر هیدرولیک فرمان 9-جعبهفرمان
1-غربیلک فرمان 2-ستون فرمان 3-سیبک فرمان 4-مخزن روغن هیدرولیک فرمان 5-پمپ و موتور 6-میلفرمان 7-گردگیر 8-شیر هیدرولیک فرمان 9-جعبهفرمان 1-غربیلک فرمان 2-ستون فرمان 3-شیرهیدرولیک فرمان 4-جعبه فرمان 5-گردگیر 6-میلفرمان 7-سیبک 8-مخزن روغن هیدرولیک فرمان 9-پمپ و موتور الکتریکی
1-غربیلک فرمان 2-ستون فرمان 3-شیرهیدرولیک فرمان 4-جعبه فرمان 5-گردگیر 6-میلفرمان 7-سیبک 8-مخزن روغن هیدرولیک فرمان 9-پمپ و موتور الکتریکی 1-غربیلک فرمان 2-موتور، سنسور و واحد کنترل فرمان 3-ستون فرمان 4-سیبک 5-میلفرمان 6-گردگیر 7-جعبه فرمان
1-غربیلک فرمان 2-موتور، سنسور و واحد کنترل فرمان 3-ستون فرمان 4-سیبک 5-میلفرمان 6-گردگیر 7-جعبه فرمان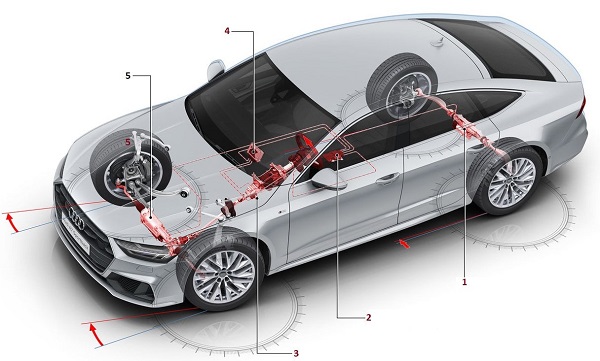 1-جعبه فرمان برقی چرخهای عقب 2-کنترل یونیت سیستم تعلیق 3-سنسور زاویه غربیلک فرمان 4-کنترل یونیت سیستم 4WS 5-جعبه فرمان برقی چرخهای جلو
1-جعبه فرمان برقی چرخهای عقب 2-کنترل یونیت سیستم تعلیق 3-سنسور زاویه غربیلک فرمان 4-کنترل یونیت سیستم 4WS 5-جعبه فرمان برقی چرخهای جلو




