
سنسور دور موتور
اساس کار سنسور دور موتور بدون در نظر گرفتن تعداد دندانههای چرخ دندانهدار به شرح ذیل میباشد. مطابق شکل زیر این سنسور دارای یک تایمر است که به میل لنگ متصل میباشد و با آن دوران میکند. این سنسور دارای سیم پیچ یا سیم پیچ پیکاپ است که دو سر این سیم پیچ به واحد کنترل یا ECU وصل بوده و دارای یک هسته و یک آهنربای دائم نیز میباشد.
آنچه در این مقاله خواهید خواند...
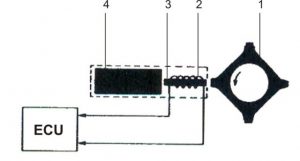 1: تایمر 2: سیم پیچ 3: هسته 4: آهنربای دائم
1: تایمر 2: سیم پیچ 3: هسته 4: آهنربای دائم
نحوه عملکرد سنسور دور موتور یا CKP
با توجه به دوران تایمر، زمانی که پرههای تایمر از روبروی سیم پیچ پیکاپ عبور میکند، تغییر شارژ مغناطیسی (تقویت و تضعیف شارژ مغناطیسی) بوجود آمده و سیگنال برق متناوبی در سیم پیچ پیکاپ بوجود میآید. این سیگنال به واحد کنترل ارسال میگردد و مهمترین مبنا برای محاسبه دور موتور، تعیین موقعیت پیستونها، محاسبه میزان پاشش سوخت، تعیین زمان پاشش سوخت، تعیین زمان جرقه و کنترل سیستم تایمینگ متغیر سوپاپها (Variable valve Timing system ) میباشد. این سنسور نیاز به برق ورودی نداشته و سیگنال تولیدی آن به صورت متناوب میباشد. با افزایش و کاهش دور موتور، تعداد سیگنالها (فرکانس) هم زیاد و کم شده و این سیگنالها به واحد کنترل الکترونیکی یا ECU ارسال می گردد تا ECU دور موتور و موقعیت پیستونها را تعیین کند.
انواع سنسور دور موتور:
بعضی از مدلهای رایج سنسور دور موتور در شکل زیر نشان داده شده است.
 a: سیگنال تولیدی توسط سنسور تعیین موقعیت میل بادامک b : سیگنال تولیدی توسط سنسور دور موتور
a: سیگنال تولیدی توسط سنسور تعیین موقعیت میل بادامک b : سیگنال تولیدی توسط سنسور دور موتور
مدلهای مختلف سنسور دور موتور و سنسور میل بادامک
اجزای سنسور دور موتور:
سنسور دور موتور در موتور خودروهای امروزی مطابق شکل زیر میباشد. در خودروهای امروزی یک رینگ دندانه دار بر روی فلایویل بسته می شود(در برخی خودروهایی که مجهز به گیربکس اتوماتیک می باشند و فاقد فلایویل میباشند این رینگ دندانه دار داخل موتور قرار میگیرد و به میللنگ متصل میباشد) که همواره به همراه میللنگ و فلایویل دوران میکند.
تا زمانی که این رینگ دندانهدار دوران میکند، دندانههای این رینگ، خطوط قوای مغناطیسی آهنربای دائم را قطع و وصل میکنند. بنابراین جریانی در سیم پیچ پیکاپ القا میشود که به صورت جریان متناوب و موج شبه سینوسی به واحد کنترل الکترونیکی یا ECU ارسال شده و واحد کنترل نسبت به محاسبه دور موتور و موقعیت پیستونها اقدام میکند.
با توجه به نمودار شکل زیر ملاحظه میشود که هر چقدر دور موتور افزایش یابد، تعداد نوسانات یا فرکانس سیگنال تولیدی هم بیشتر شده و بنابراین واحد کنترل افزایش دور را تشخیص میدهد. به عبارتی دیگر، دور موتور مضربی از فرکانس موج شبه سینوسی تولید شده میباشد. به ازای هر دندانه، یک موج شبه سینوسی تشکیل میشود، به طوری که هر موج شبه سینوسی به منزله عبور یک دندانه از روبروی سنسور بوده و بدین ترتیب سرعت دورانی میل لنگ نیز اندازهگیری میشود.
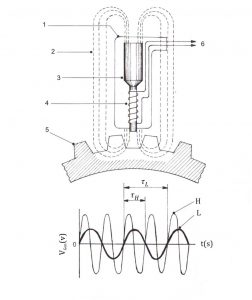 1: مجموعه سنسور 2: خطوط قوای مغناطیسی 3: آهنربای دائم
1: مجموعه سنسور 2: خطوط قوای مغناطیسی 3: آهنربای دائم
4: سیم پیچ پیکاپ 5: رینگ دندانه دار 6: به واحد کنترل
نحوه عملکرد سنسوردورموتور
محل نصب سنسوردورموتور:
شکل ظاهری سنسور دور مطابق مطابق تصویر زیر میباشد.
 شکل ظاهری سنسوردورموتور
شکل ظاهری سنسوردورموتور
در خودروهایی که رینگ دندانهدار سنسور دور موتور به فلایویل متصل میباشد سنسور دور موتور مطابق شکل زیر بر روی پوسته جلوی گیربکس(گلدانی جلوی گیربکس) نصب میگردد و در خودروهایی که مجهز به گیربکس اتوماتیک میباشند و به دلیل وجود تورک کانورتور یا مبدل گشتاور فاقد فلایویل میباشند، رینگ دندانه دار داخل کارتل و روی میللنگ نصب میباشد که بدیهی است در این نوع موتورها، سنسور دور موتور بر روی بلوکه سیلندر نصب میشود.
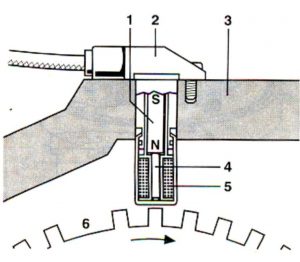 1: آهنربای دائمی 2: محفظه سنسور 3: بدنه موتور 4: هسته سیم پیچ پیکاپ 5: سیم پیچ پیکاپ 6: رینگ دندانهدار و دندانههای حذف شده برای مشخص نمودن نقطه مرگ بالا یا TDC(Top Death Center)
1: آهنربای دائمی 2: محفظه سنسور 3: بدنه موتور 4: هسته سیم پیچ پیکاپ 5: سیم پیچ پیکاپ 6: رینگ دندانهدار و دندانههای حذف شده برای مشخص نمودن نقطه مرگ بالا یا TDC(Top Death Center)
پیستون شماره یک
نحوه نصب سنسور دور موتور
باید دقت نمود که در این نوع سنسور، ابعاد دندانههای رینگ دندانهدار و فاصله هوایی بین سنسور و رینگ دندانهدار، فاکتورهای حیاتی برای دامنه سیگنالهای تولیدی میباشند. بنابراین باید همواره نسبت به تنظیم بودن فاصله هوایی بین سنسور و رینگ دندانهدار (معمولا بین 8/0 تا 2/1 میلی متر) دقت لازم را مبذول داشت.
معمولاً رینگ دندانهدار دارای 60 دندانه منظم میباشد. بنابراین فاصله بین هر دو دندانه 6 درجه از گردش میللنگ میباشد. مطابق شکل فوق، در موقعیت نشان داده شده توسط عدد 6، دو دندانه از دندانه های رینگ دندانهدار برداشته شده است. از اینرو به اندازه 15 درجه از رینگ دندانهدار خالی بوده و دندانهای وجود ندارد. با چرخش میل لنگ، رینگ دندانهدار، خطوط قوای مغناطیسی آهنربای دائم را قطع کرده و جریانی در سیم پیچ پیکاپ القا میشود. ولی به محض اینکه قسمت بدون دندانه در مقابل سنسور قرار میگیرد، جریانی در پیکاپ القا نشده و یا شکل موج ایجاد شده با شکل موج نقاط دیگر متفاوت میگردد.
بنابراین واحد کنترل الکترونیکی یا ECU این موقعیت را شناسایی میکند. هنگامی که دو دندانه خالی روبروی سنسور قرار میگیرد، پیستون 1، حدود 120 درجه قبل از نقطه مرگ بالا است. در واقع این 120 درجه مهلتی است که به واحد کنترل داده میشود تا بتواند قبل از اینکه پیستون نقطه مرگ بالا برسد، زمان مناسب پاشش سوخت، ایجاد جرقه و باز و بسته شدن سوپاپ ها(در موتورهای مجهز به VVT) را محاسبه و اعمال کند.
واحد کنترل آوانس استاتیکی جرقه (معمولاً بین 8 تا 10 درجه قبل از نقطه مرگ بالا) را نیز مد نظر قرار داده و دستور اعمال جرقه در سیلندر یک و چهار (در سیستم جرقه زنی با کویل دوبل) و پاشش سوخت توسط انژکتورهای یک و چهار (در سیستم پاشش نیمه ترتیبی) را در زمان معین صادر میکند و با وجود سنسور موقعیت میل بادامک یا CMP(CaMshaft Position Sensor) فاز حرکت پیستونها هم مشخص کرده و بنابراین سوخت و جرقه هر سیلندر به طور مستقل قابل کنترل خواهد بود. لازم به ذکر است که در سیستم جرقه دوبل، فقط جرقه یک سیلندر مفید خواهد بود چون سیلندر دیگر در حالت تخلیه میباشد.
اشتراک در
0 نظرات
تازهترین
تازههای آموزشی























